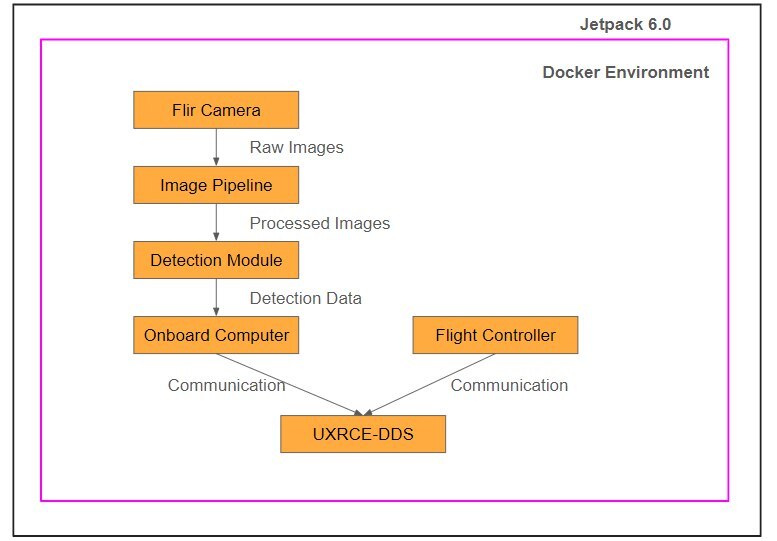
Our drone software, built on Jetpack 6.0 and Isaac ROS, combines uXRCE-DDS for reliable communication between the onboard computer and flight controller, Isaac ROS Image Pipeline for detections and a FLIR camera for perception. This integrated solution, packaged in a Docker container, offers a portable and efficient platform for drone operations.
Simulation
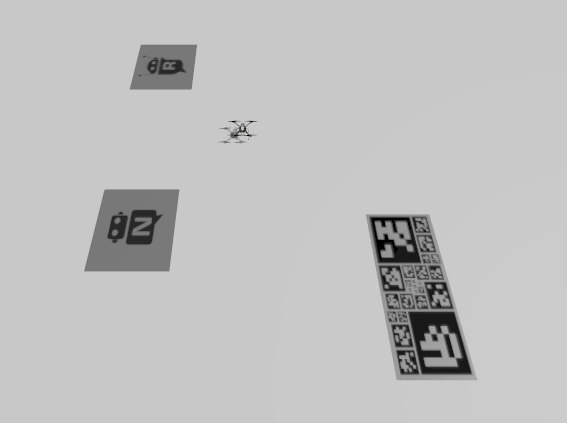
We utilize Gazebo Garden with PX4 Software In The Loop (SITL) to perform testing from within a safe environment before changes are implemented in actual flights. By adding in our own AprilTag and Robonation canvases, the simulation has enabled us to test a myriad of software components, from motion planning and flight controller communications, to behaviour trees and even detection algorithms. This greatly improves our testing efficacy as we are able to debug software problems more efficiently and achieve our intended flight behaviours.
Mission Planner
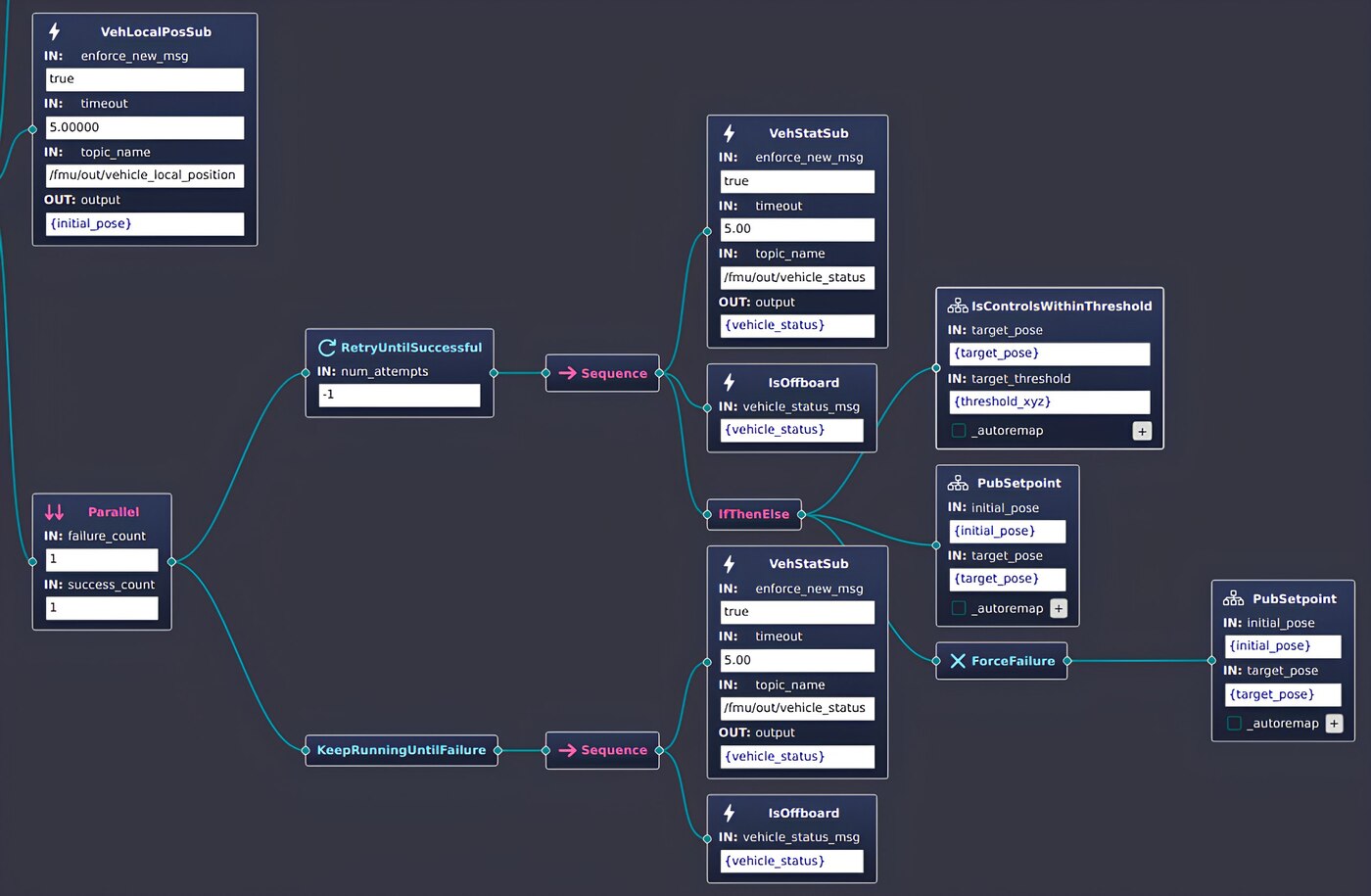
The Behaviour Tree (BT) based mission planner of ASV 4.0 is also used by Jellyfish 2.0 for seamless intervehicle mission planning. The mission planner provides modular organization of high-level plans and abstracts away low-level details, facilitating easy design, modification and reuse of mission plans and vehicle behaviour. The Graphical User Interface (GUI) of the mission planner provides a more human-centric interface to enhance the development process.
Vision
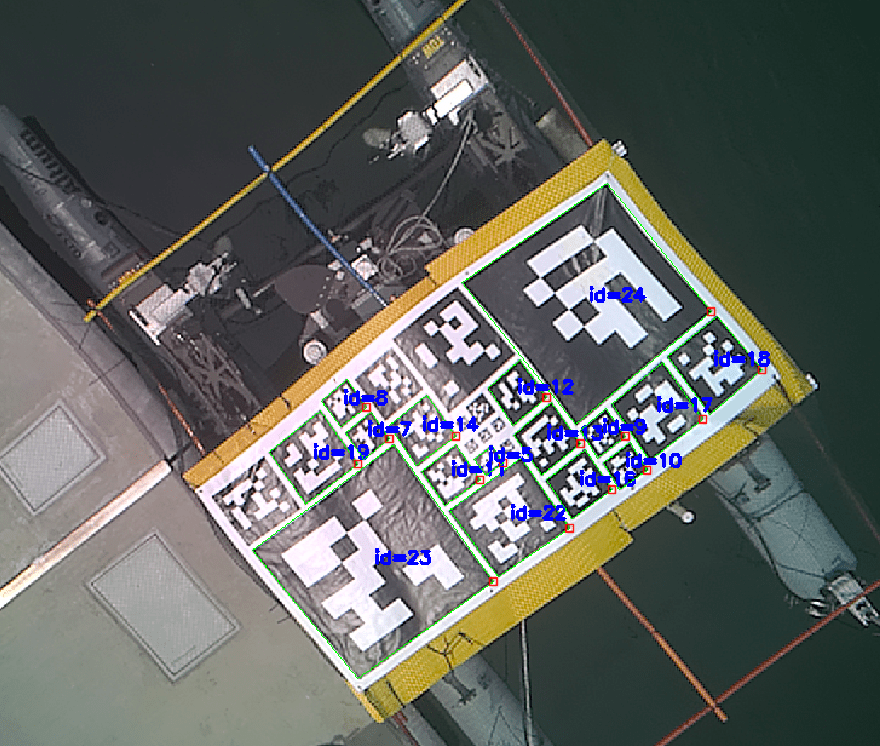
We utilized AprilTags by placing them on the landing platform strategically . These tags, acting as visual markers, allows the drone to accurately determine its position and orientation relative to the platform. By analyzing the distorted perspective of the AprilTags from the camera’s view, we could calculate its exact pose, enabling precise landing manoeuvres.
Simultaneously, a YOLOv8 inference node was tasked with identifying game elements within the drone’s field of view. This real-time object detection algorithm, trained on a vast dataset of game-specific imagery, could accurately locate and classify various game elements such as the Robonation canvases as well as the tins for UAV Replenishment.