The electrical system had a complete overhaul from our previous UAV. The biggest change would be moving away from the proprietary DJI flight control system to the open-source PX4 flight stack instead.
A fully integrated electrical system that caters to all peripherals at once is also integrated to allow for easier operation and maintenance of Jellyfish2.0.
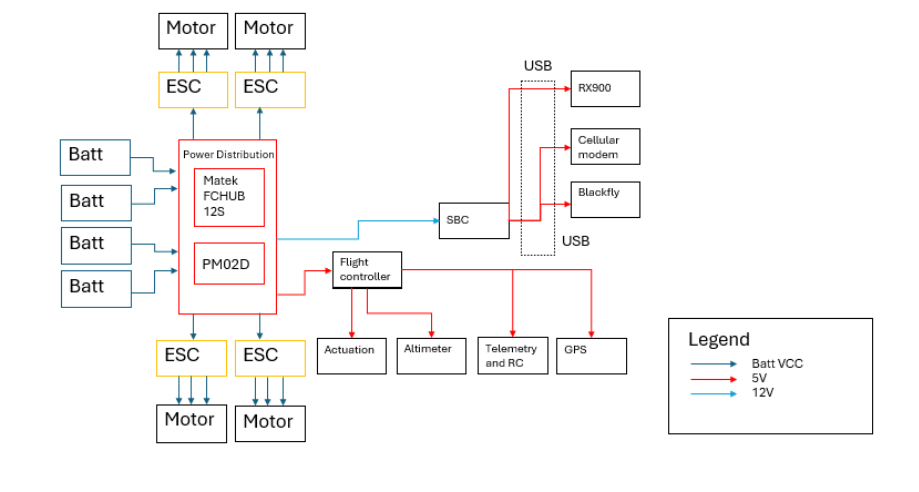
Power Architecture
A centralized power distribution board provides the necessary power for all peripherals on Jellyfish 2.0. Peripherals important to the drone’s operation, cheifly the flight controller and Single Board Computer, will have extra power regulators for redundancy.
All remaining peripherals interface with either the flight controller or the Jetson directly. Peripherals that handle navigation, manual control and UAV monitoring interface directly to the flight controller, while wireless communication and perception devices will interface to the Jetson directly over USB.
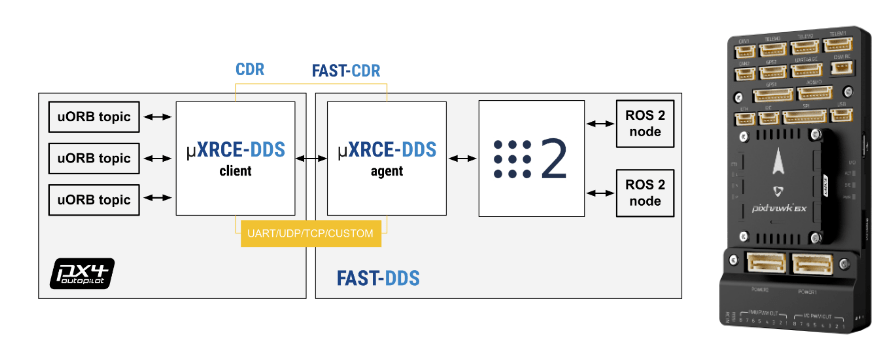
Flight Controller
The Pixhawk 6X flight controller was chosen for its support of the open source PX4 firmware and compatibility with ROS2 over uXRCE-DDS middleware.
uXRCE-DDS allows for easy integration between ROS2 and PX4, where the messaging API “uORB” can be used to publish/subscribe messages from the PX4 firmware as though they were ROS2 topics.
The Pixhawk 6x provides this connection through ethernet, which is more robust as compared to serial connections.
Inter-Vehicle Communication
In order to coordinate autonomous takeoff and landing with the BBASV 4.0, Jellyfish 2.0 also utilizes a radio with a custom adapter board and protocol that works in a similar manner to the BBASV 4.0’s.