A behind the scenes of our progress!
. . .
Fresh off our finals and with Post-RobotX nostalgia setting in, we held an after-action review of ASV3.0 in our lab. Each sub team took turns to go around to share “what went well” and “what didn’t go well”. It was a pretty insightful session.
A key take away was that our team decided to proceed with a 2-stage testing timeline. We will attempt to validate our electrical architecture on BBASV 3.5, with minimal mechanical changes from BBASV 3.0. We will then launch BBASV 3.5 for 1 month of sea trials to validate the electrical architecture. Tests will also be conducted to help us make design descisions for BBASV 4.0 (the ASV that we will launch for RobotX 2024).
The electrical team have identified several tests that we want to conduct prior to further designs for BBASV 3.5. One of the tests is to determine if we can find a better thruster to improve our efficiency. This is as we found that our thrusters were almost at full power just to station keep at RobotX 2022.
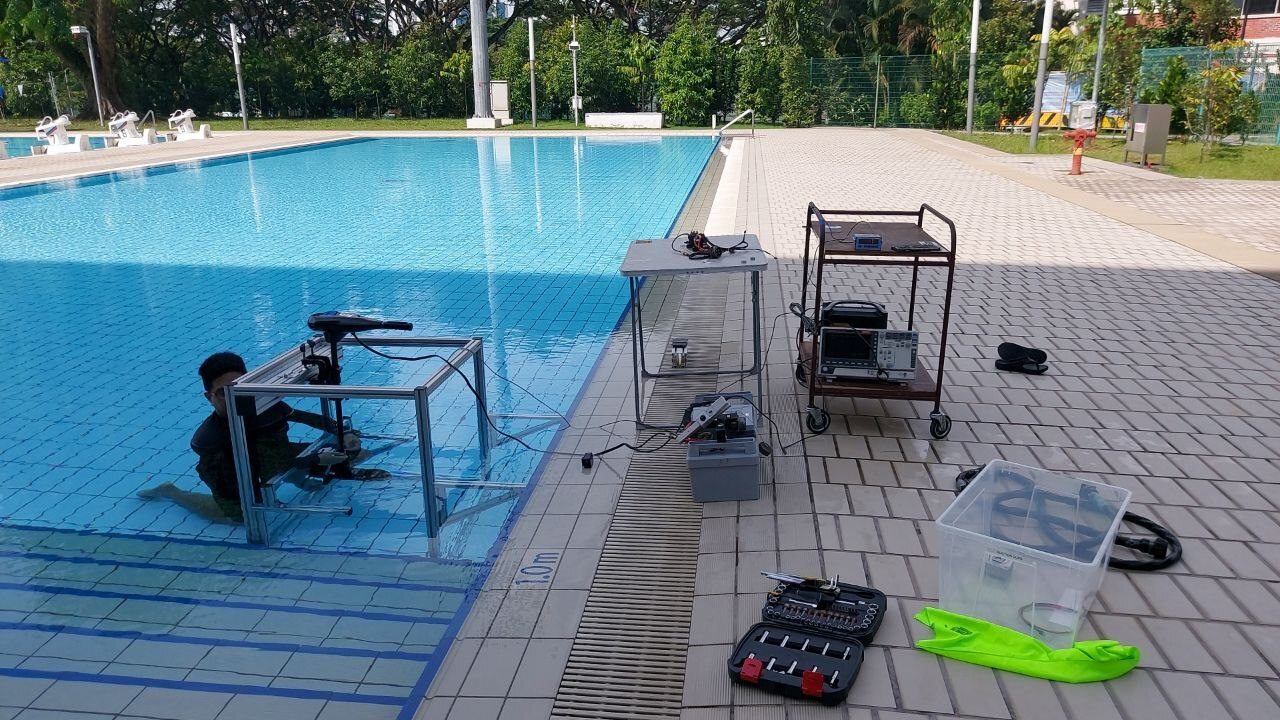
What a nerve wrecking day it was! We tried to power our electrical system up for the first time today. It was a relief to see that most of the things are working. Unfortunately there are some bugs we have to iron out before deployment on 2nd Jan, but we will try our best to resolve them.

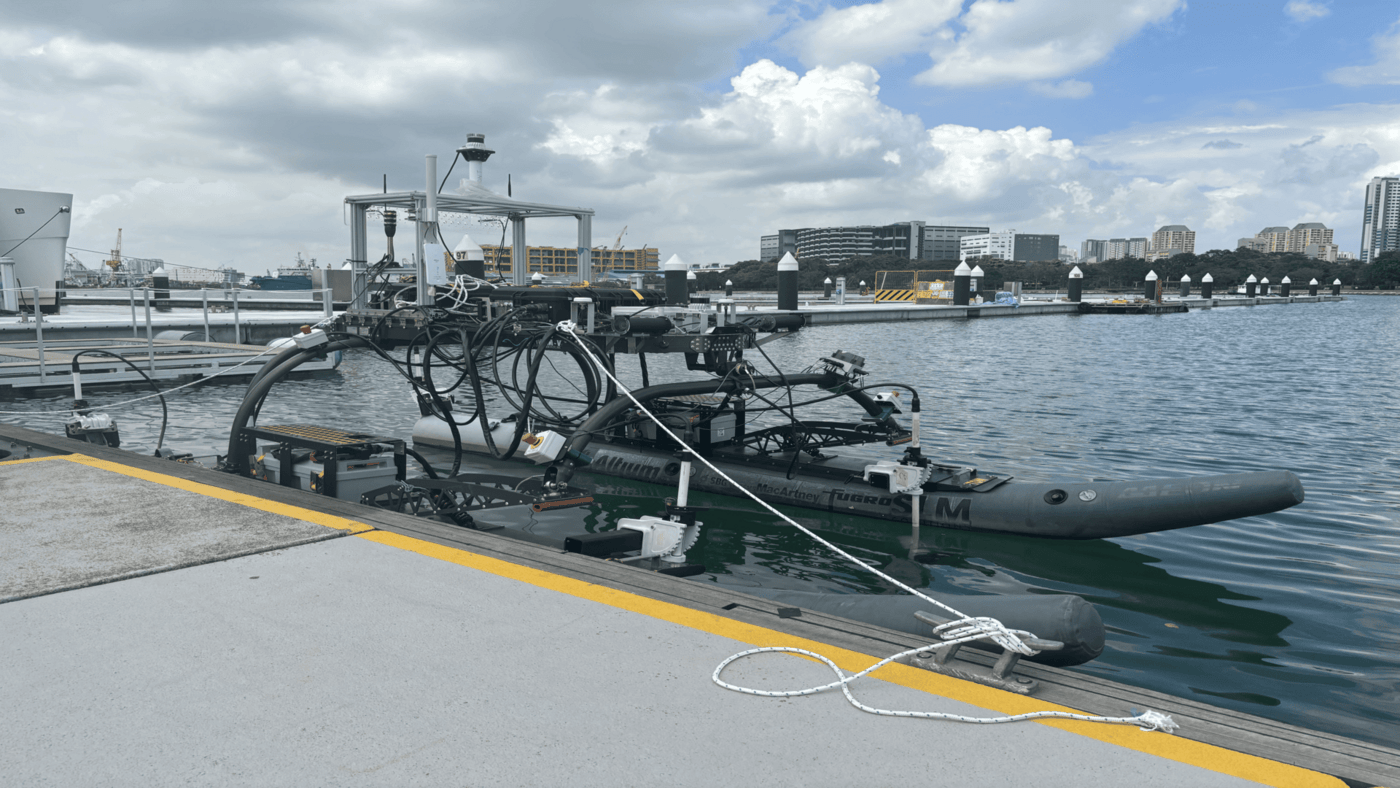
After almost a year of designing, fabricating and testing, we finally launched ASV3.5 for sea trials. Can’t wait to collect some useful data to help inform our decisions for BBASV 4.0. We will be looking forward to evaluating various thrusters’ layout, range of our wireless system and even the runtime of our vehicle. The hot and wet weather of Singapore will also test the reliability of our vehicle, putting it through its limits. I will keep my fingers crossed for a safe sea trial!
In a blink of an eye, the first set of sea trials have concluded. Data has been collected and analyzed. It is time for the team to go back to the drawing board and refine our design. But unfortunately, as with every sea trial deployment, there is the pain of cleaning up any build up on our thrusters and pontoons.

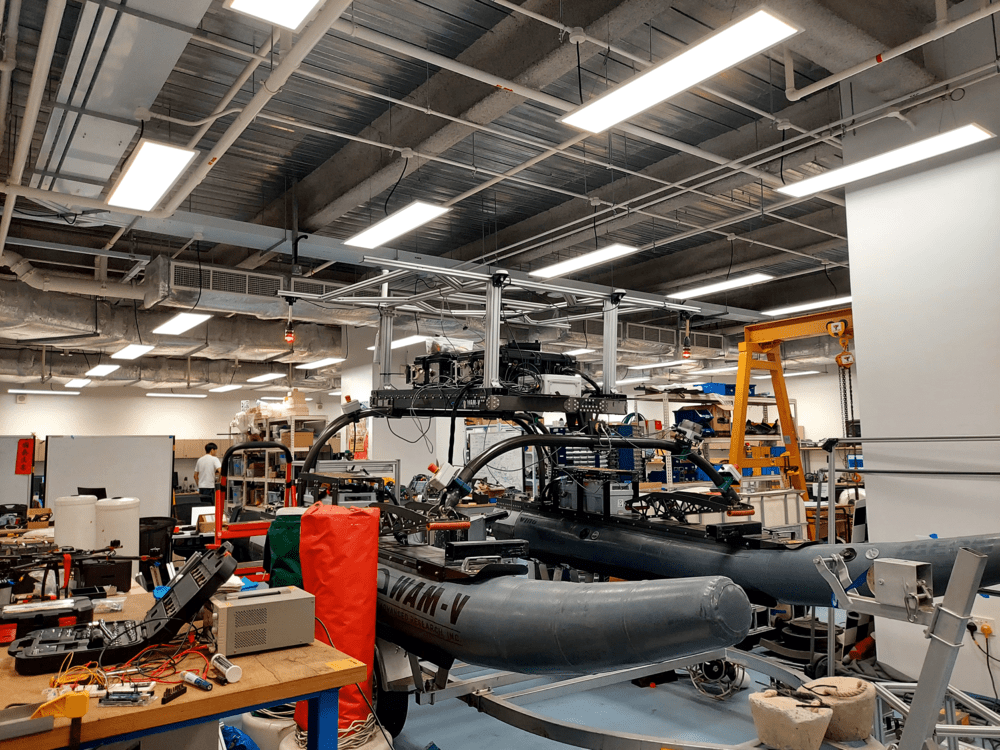
Our team has been busy working on improving the vehicle. A few notable additions are the widened landing platform for the drone and our acoustic system. Similar to the previous deployment, we have ran few integration tests, everything seem fine for now and we are ready to deploy!
We have finally deployed BBASV 4.0! For the next 10 weeks we will be testing the BBASV 4.0 at the Republic of Singapore Yacht Club. This time round, we will try to incorporate more competition taskings into our tests. This would include drone takeoff and landing, acoustic pinger detection and encircling of buoys. Can’t wait to see what BBASV 4.0 can do!
