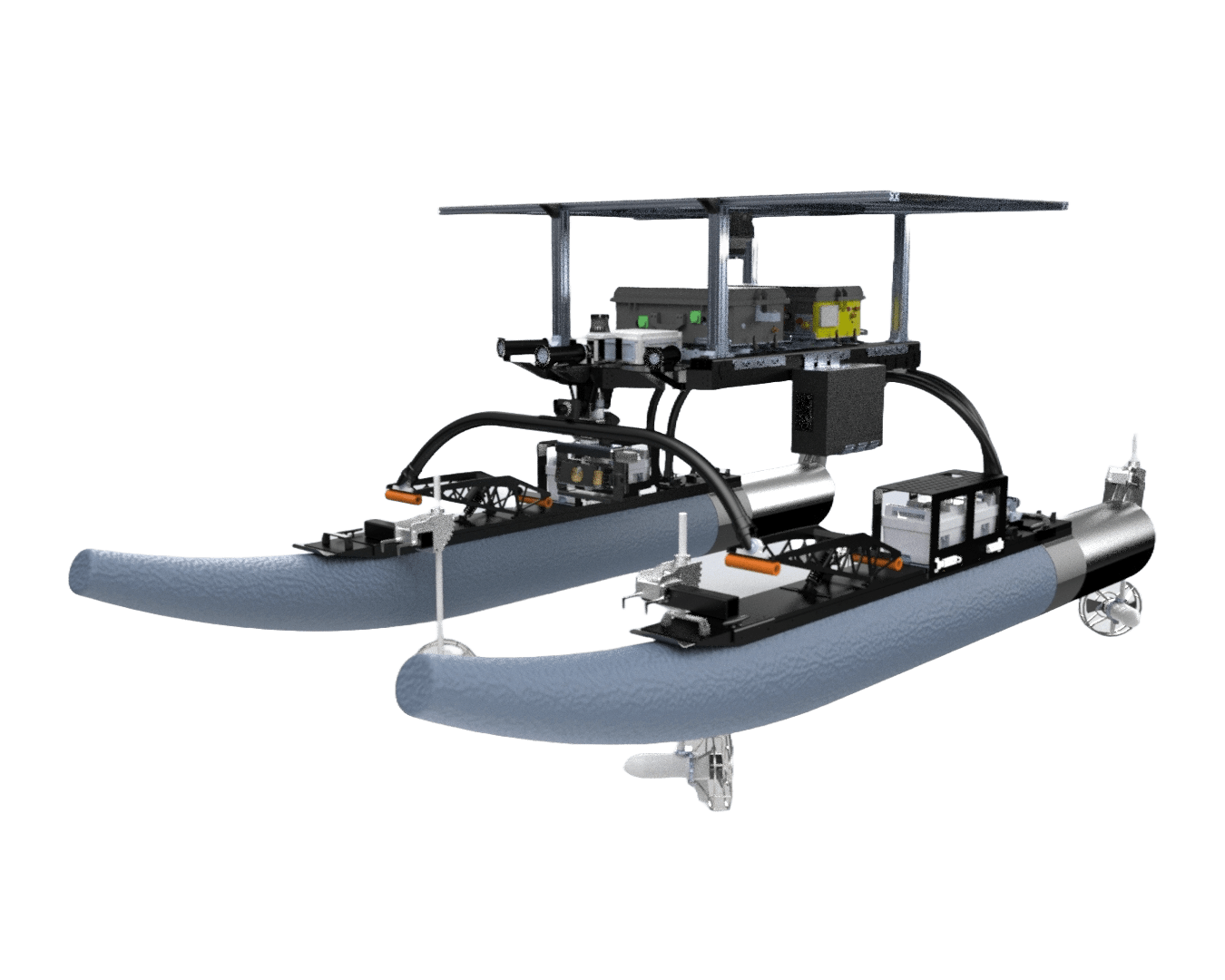
System Overview
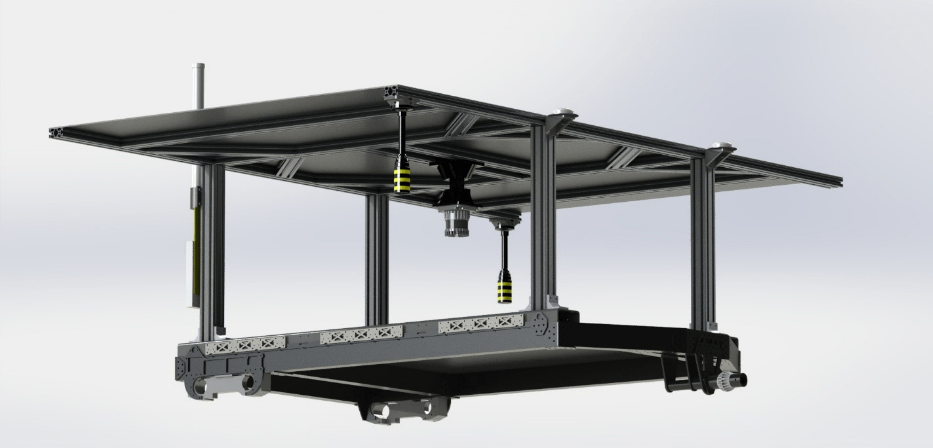

Mechanical Sub-System
The mechanical sub-system of BBASV 4.0 focuses on reliability and maintainability to provide team members with a robust platform for testing.
With this approach, the BBASV 4.0 adopts a more conservative method of mechanical development. The subsystems proven to work on the BBASV3.0, such as the battery cage, camera, and thruster configuration are again used on the BBASV 4.0. The state-of-the-art actuated drone landing platform and spring actuated ball shooter are replaced in favor of a larger static landing platform, which also serves as mounting points for sensors and communication equipment, as well as a lighter, more maintainable flywheel-based ball shooter.
Additionally, to allow team members to debug and make changes to the electrical components in a timely fashion, the mounting for BBASV 4.0’s series of hulls are overhauled to be more easily accessible, and the Power Hull and Main Hull are placed on sliding trays so that they can be mounted and dismounted from both port and starboard sides.
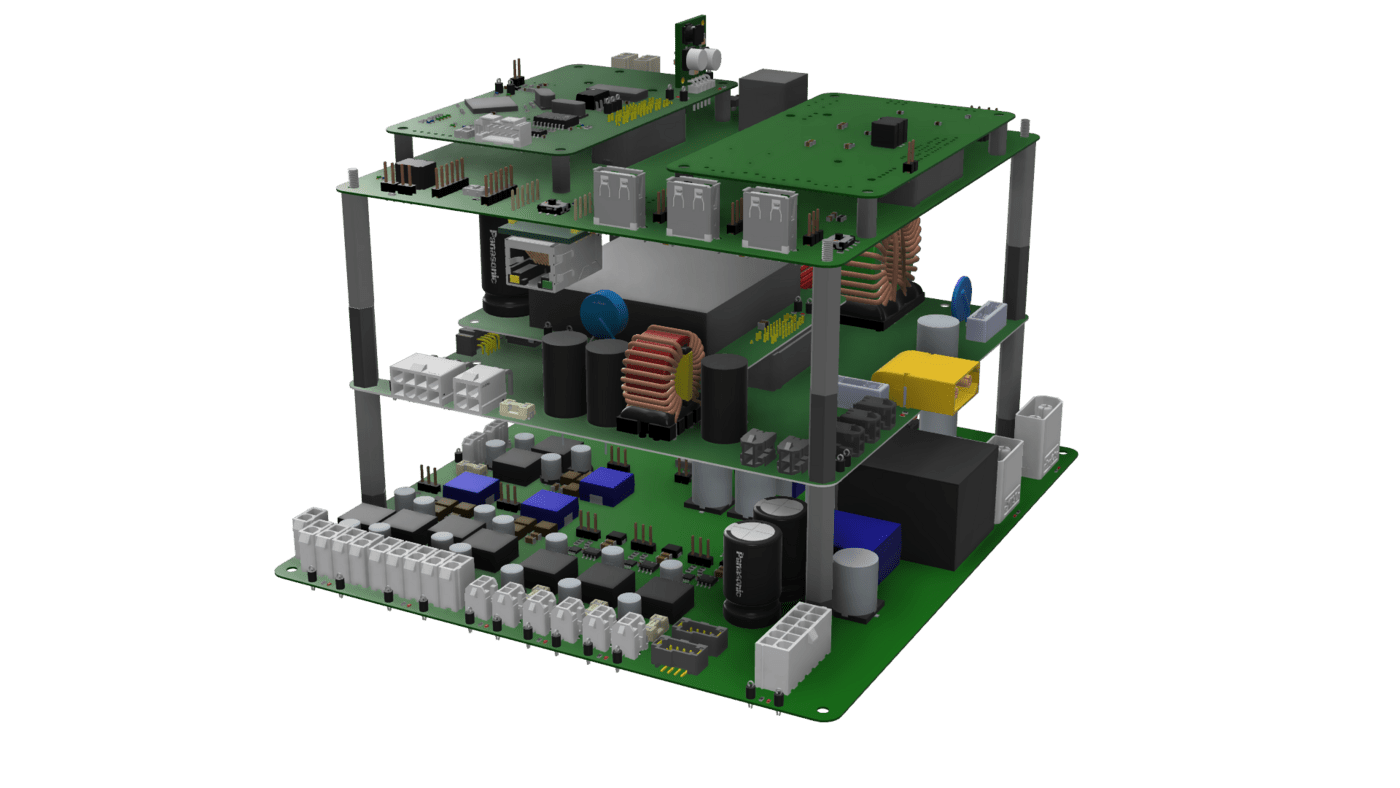
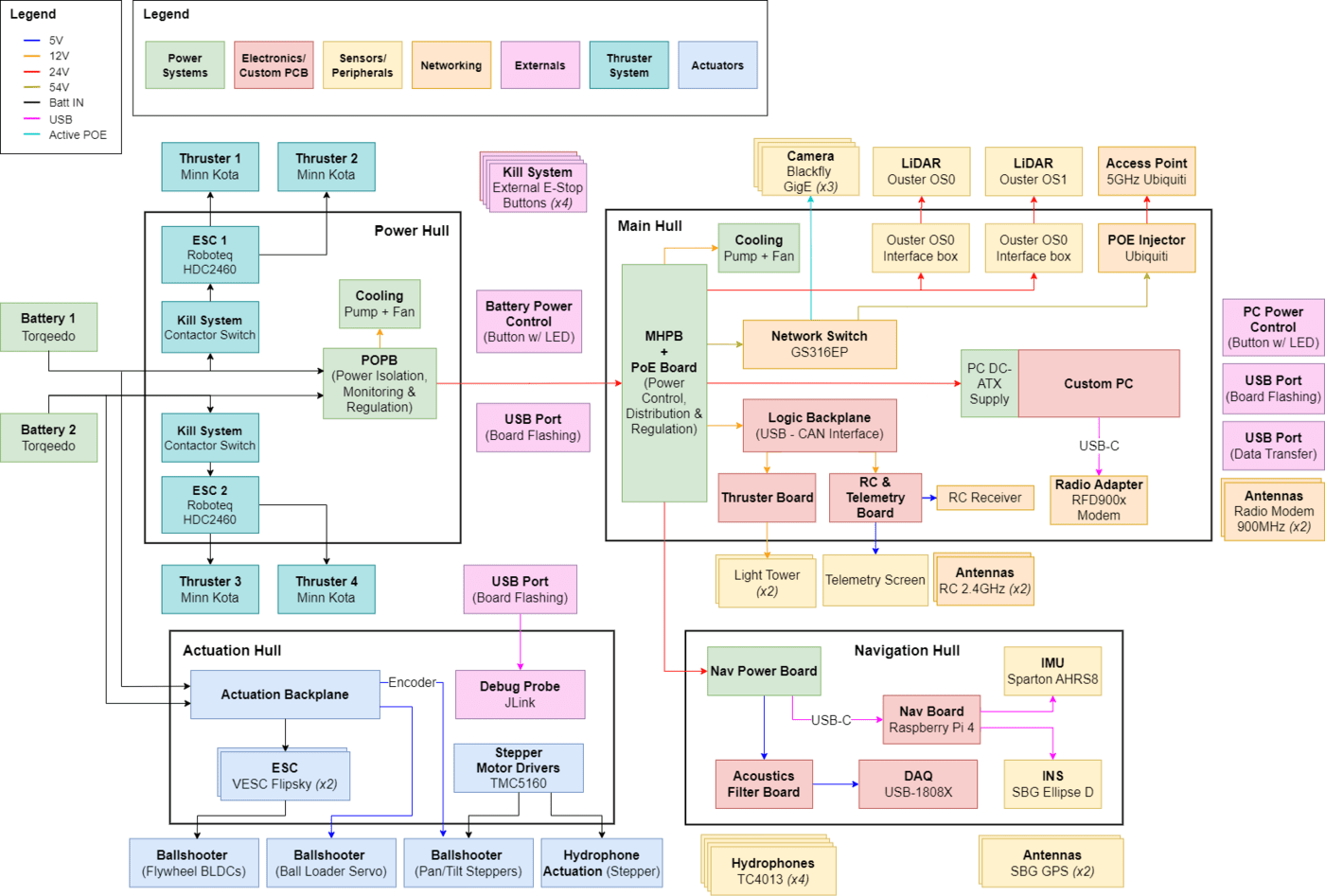
Electrical Sub-System
The electrical stack of BBASV 4.0 focuses heavily on developing a stable platform to maximize in-water testing time for the software team.
To achieve this, the design methodology of the electrical system focuses on modularity so each subsystem can be integrated and tested more easily. We have overhauled our power distribution system to include better power management, monitoring, as well as control over individual power channels, thereby increasing the robustness of our system.
Additional quality-of-life improvements include the development of an adaptor board for our radio modem that can be easily integrated into 3 different platforms to facilitate inter-vehicle communication. Improvements to our telemetry coverage were also made, allowing users to monitor critical data such as battery statistics from both the remote controller screen and the Operator Control Station (OCS) screen.
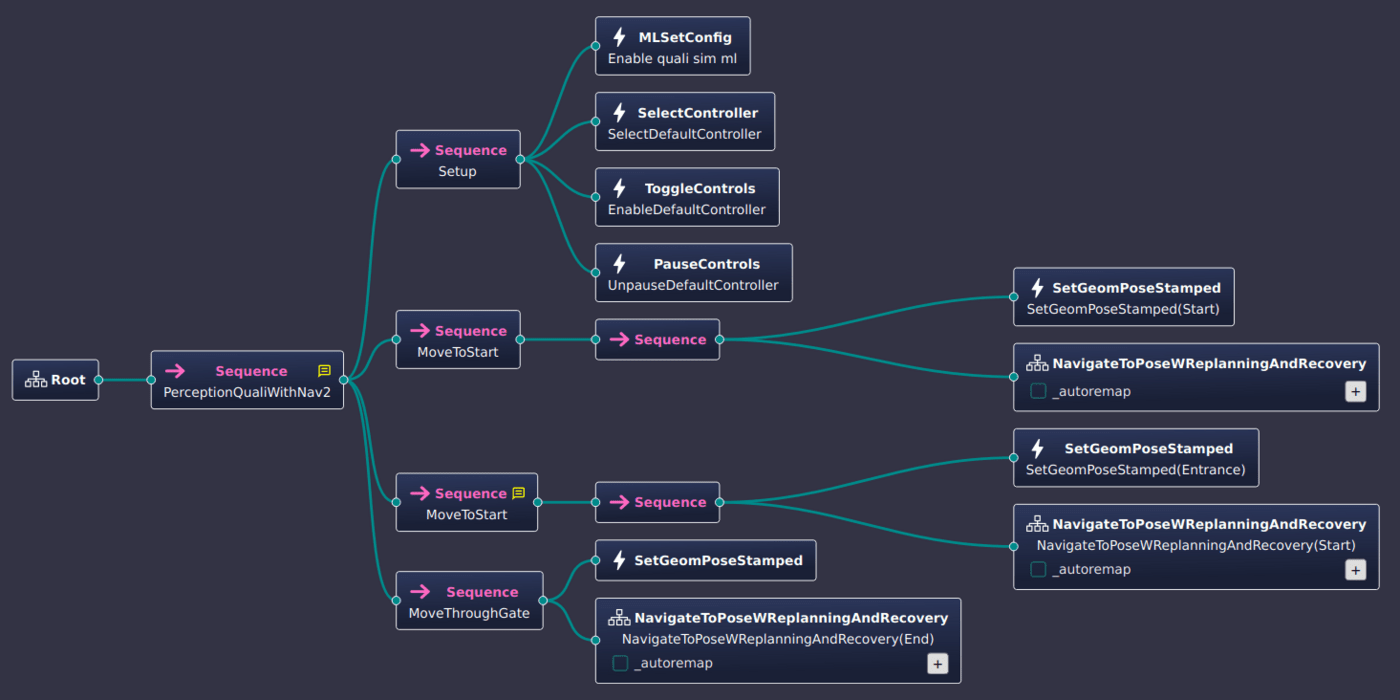
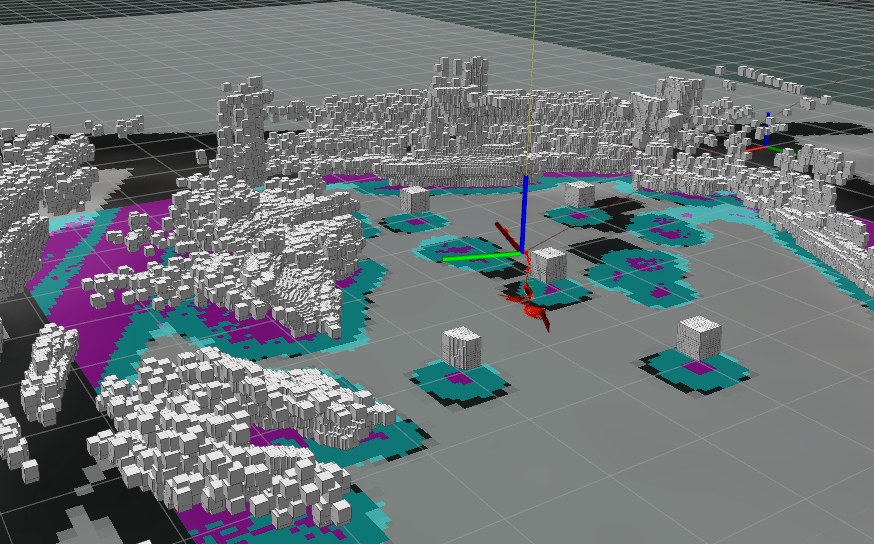
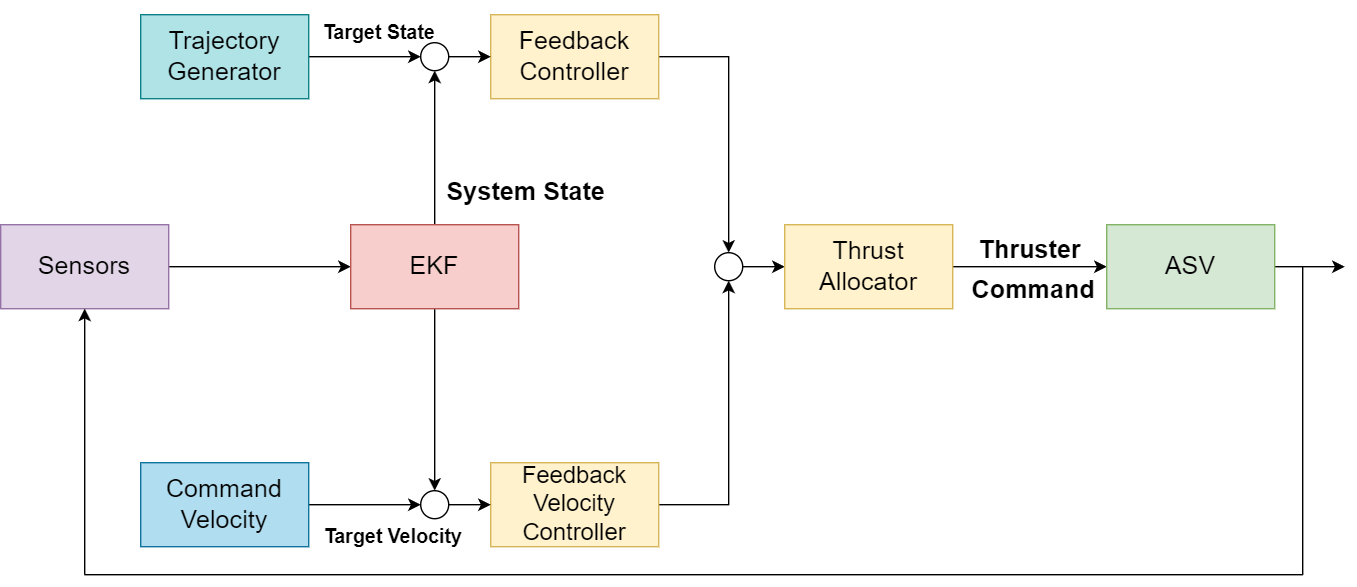
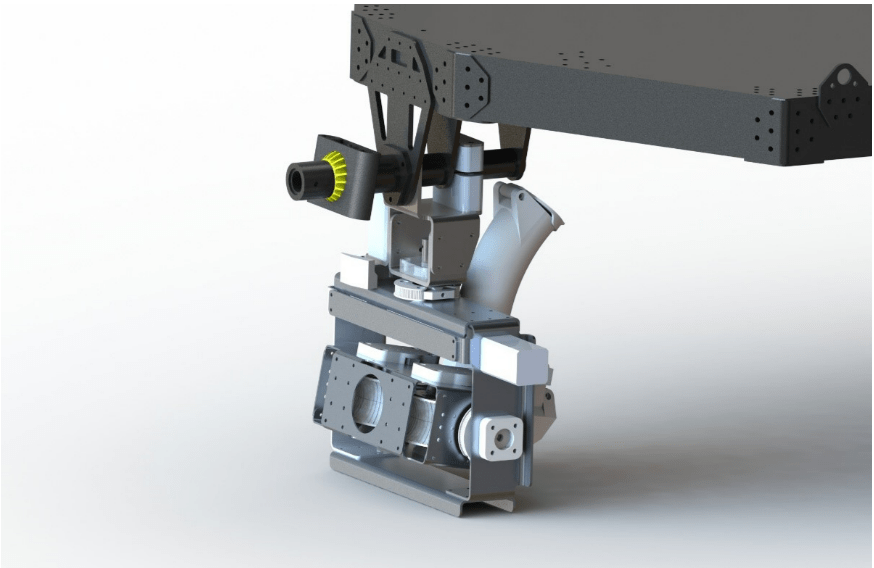
Software Sub-System
The software subsystem of BBASV 4.0 integrates advanced Localization, Perception, Navigation, and Mission Planning components to enable precise autonomous operation. Using a dual-antenna GNSS/INS with LiDAR-based odometry, the vehicle achieves centimeter-level accuracy, while its perception system leverages cameras and LiDAR to detect targets and obstacles. The navigation stack handles motion planning and collision avoidance, and mission planning consolidates all inputs to manage the vehicle’s autonomous behavior and task execution. Together, these systems ensure reliable and efficient performance in dynamic environments.
