Competition Vehicles
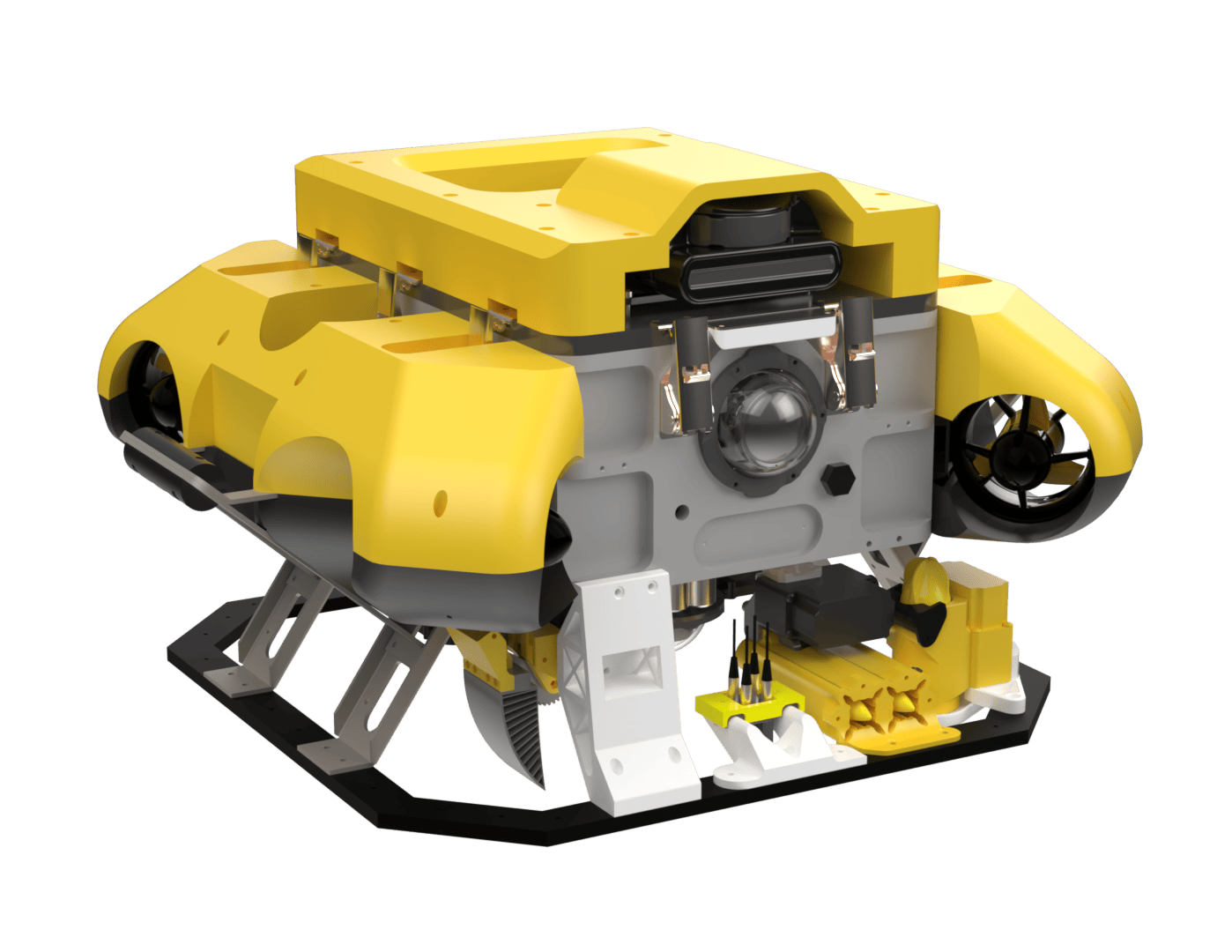
Bumblebee AUV 4.5
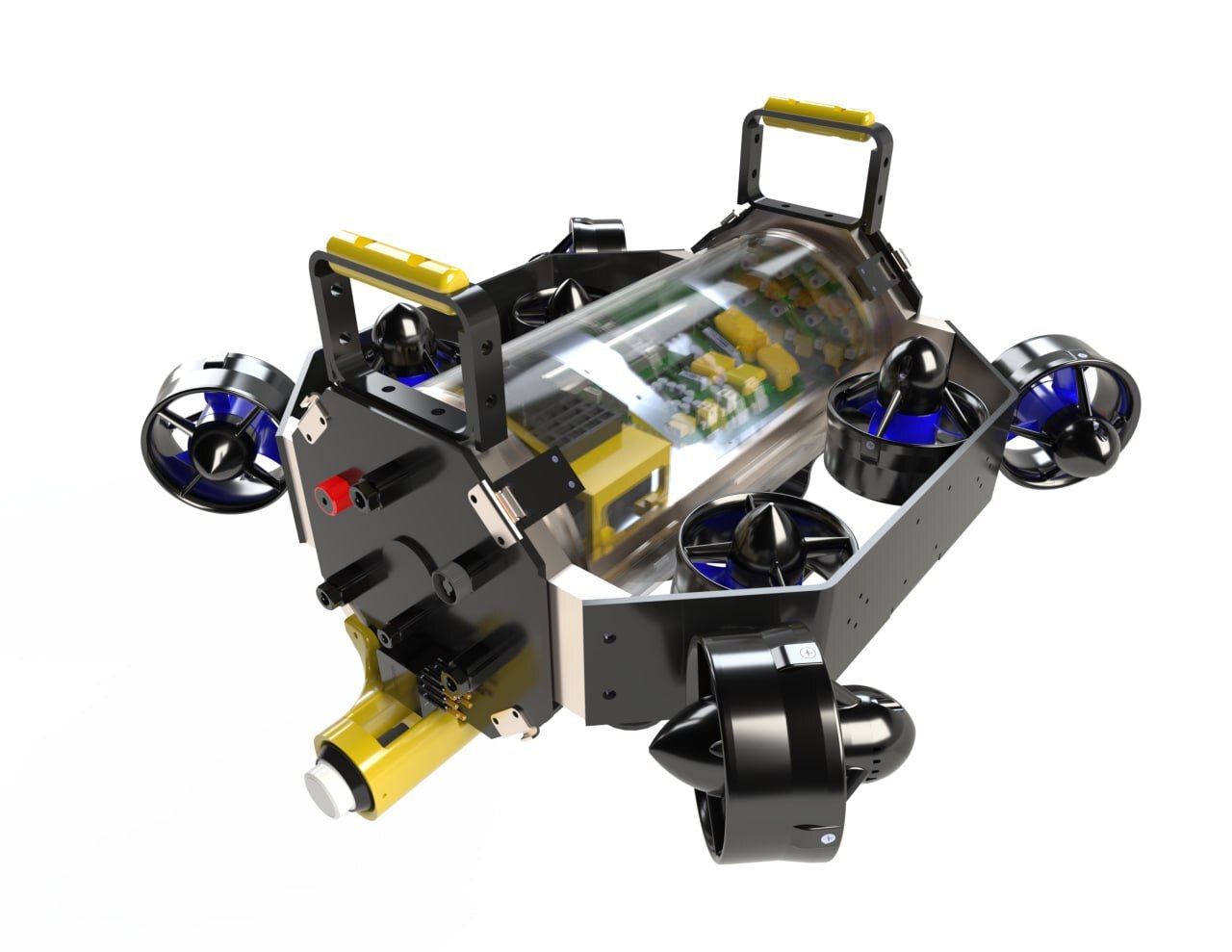
Mini-AUV
Our Progress and Plan
After our experience at RobotX, we jumped right back into the lab to begin preparations for RoboSub 2025. Many changes would have to be made and a lot of things needed to be done.
Our journey is chronicled through a detailed timeline, and you can explore our progress and reflections in our blog. We’ve also carefully developed our strategy, which you can find in our comprehensive technical paper.
BBAUV 4.5 System Overview
Mechanical Sub-System
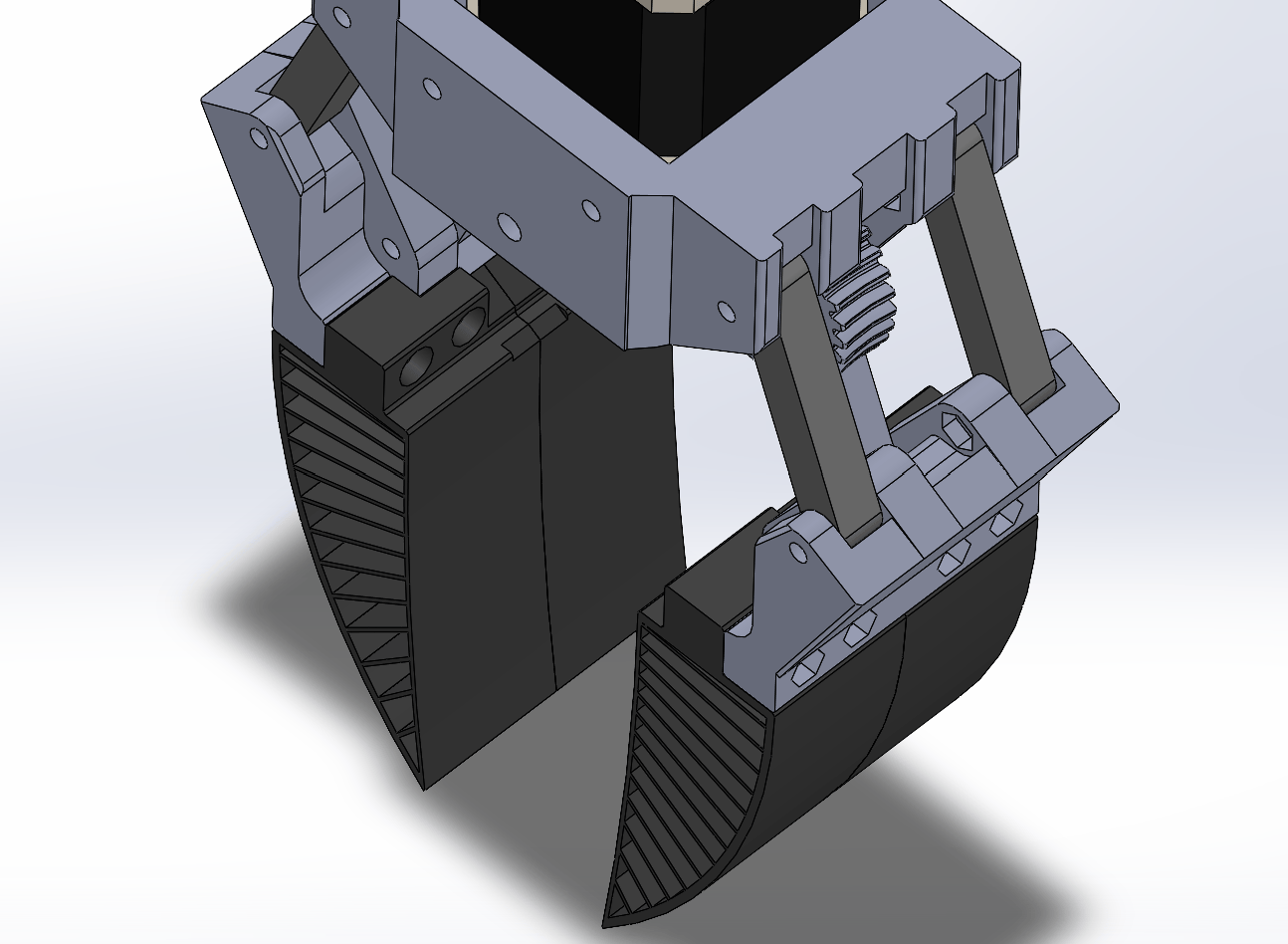
BBAUV 4.5 retains the same external look as its predecessor, featuring a refurbished structure with a newly manufactured hull and frame. We have significantly reworked our actuation suite to meet this year’s requirements. Our torpedoes were redesigned for better range and stability. A new marker dropper compliments our custom marker to improve accuracy and reduce drift. We also upgraded our soft robotic grabber with Finray TPU fingers and a more robust 4-bar linkage for better reach and adaptability.
Electrical Sub-System
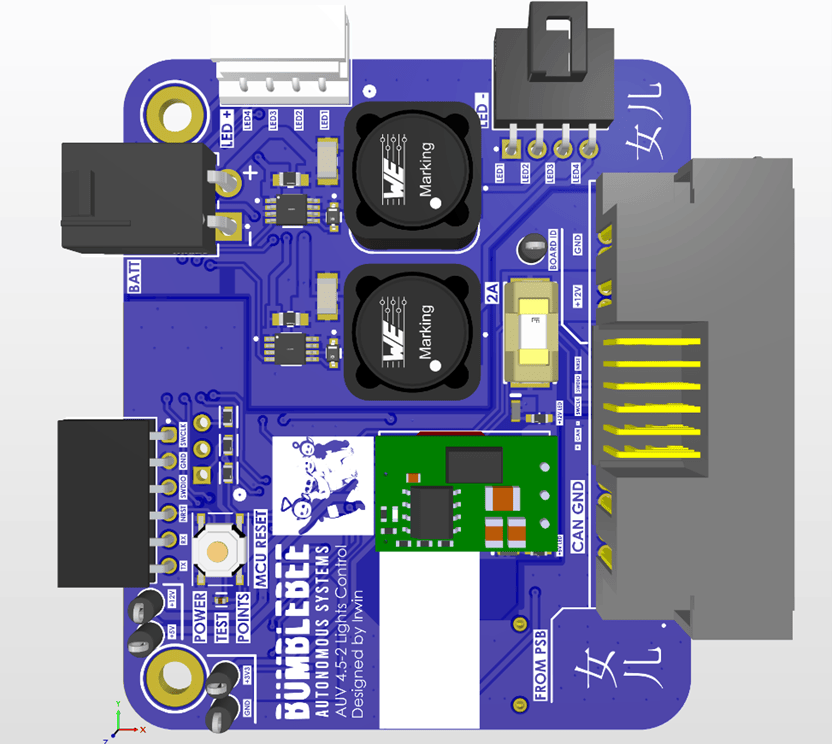
Our electrical architecture has undergone a major overhaul in this iteration of our flagship AUV. Given that the core design of the old subsystem is 5 years old, it is fast approaching its limits in terms of what features it can support. A major highlight was the change in microcontroller from Atmel to STM32, which has better support for more firmware features and offers better performance.
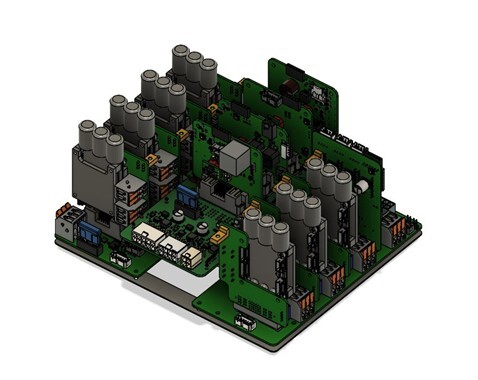
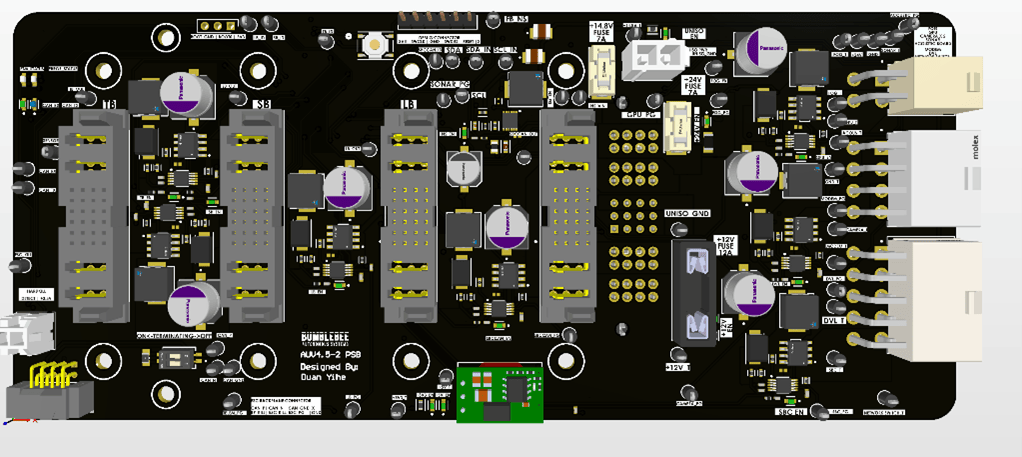
We have redesigned our backplane-based stack to fit more boards, and to improve user experience and maintainability.
Improvements to our power subsystem were also made, with better filtering and control over voltage rails that power key components in the vehicle. We have also expanded our telemetry coverage to allow our members to monitor key vehicle stats from anywhere, at any time.
Software Sub-System
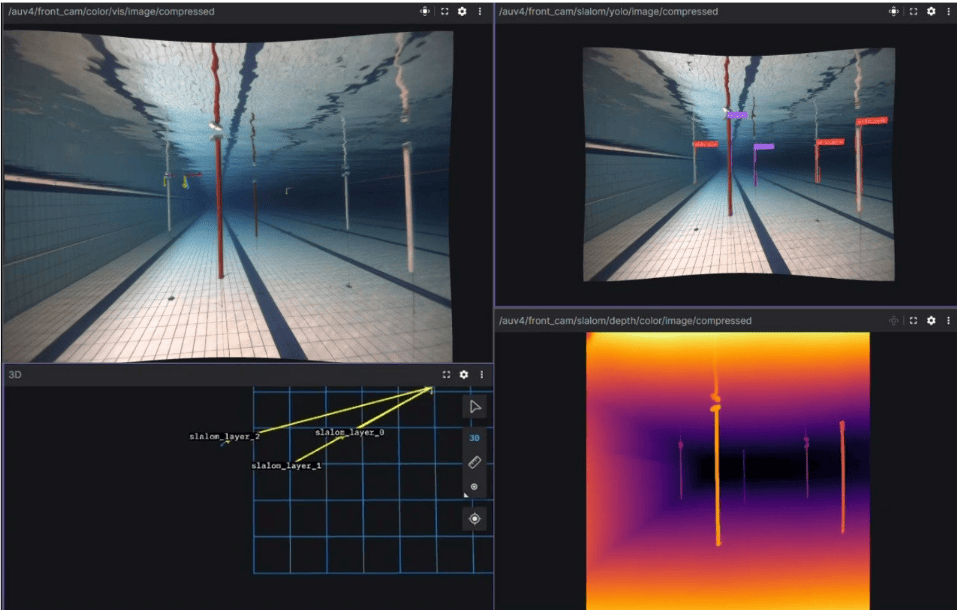
Our BBAUV 4.5 software architecture represents a significant leap forward, building upon our strong foundation while introducing key advancements. A major highlight is the migration from ROS1 Noetic to ROS2 Humble, a meticulous transition that ensures continued robust performance and sets the stage for future innovation. This upgraded framework supports our cutting-edge perception pipeline, which combines AI-powered deep learning models with traditional computer vision techniques for highly robust underwater object detection and precise localization.
The BBAUV 4.5 maintains BBAUV 4.1’s tried-and-tested localization and control systems, enhanced for even greater reliability and efficiency. The control system features a sophisticated trajectory planner, feedforward/feedback controller, and a QP solver-based thrust allocator for smooth, efficient, and precise movements.
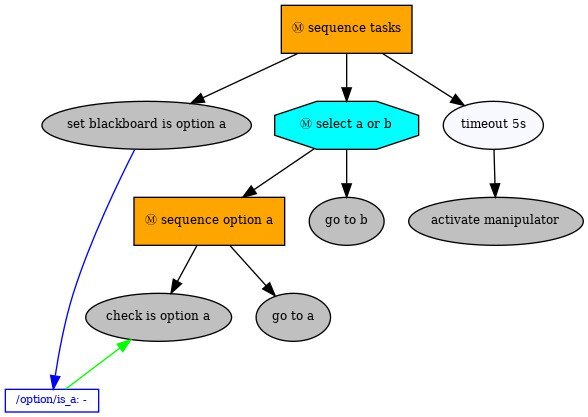
A major overhaul in BBAUV 4.5 is the mission planner’s transition to py_trees. This move prioritizes team productivity and debugging through improved introspection and ROS integration. Finally, we’ve implemented high telemetry coverage for BBAUV 4.5. This includes an optimized CAN standard and custom message passing for efficient communication, providing richer manipulator feedback and automated reporting to boost operational efficiency during testing.
Mini-AUV System Overview
Mechanical Sub-System
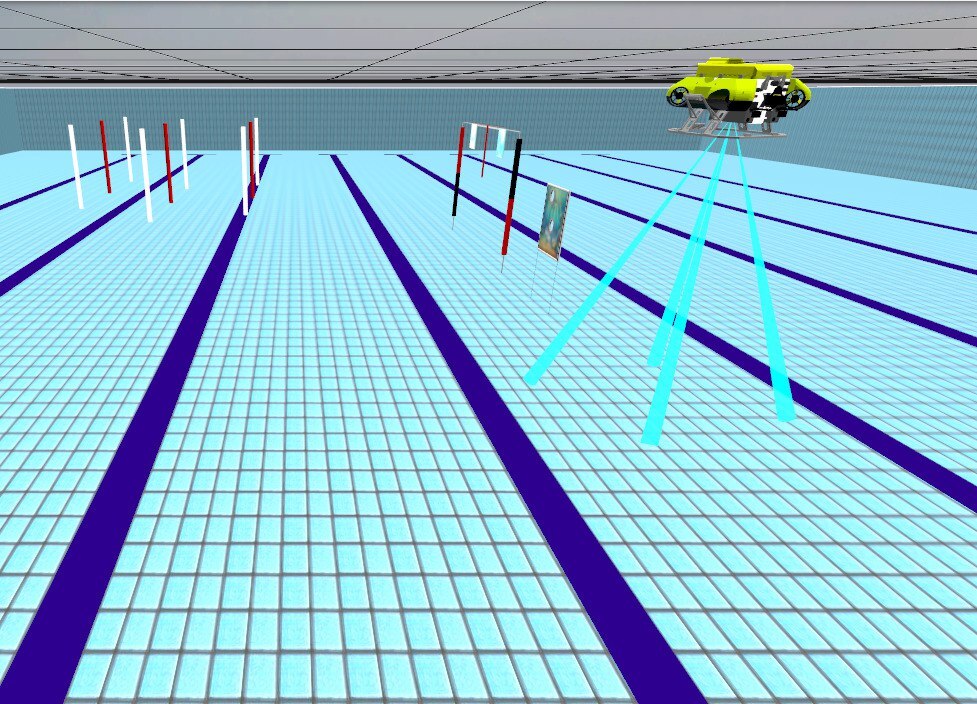
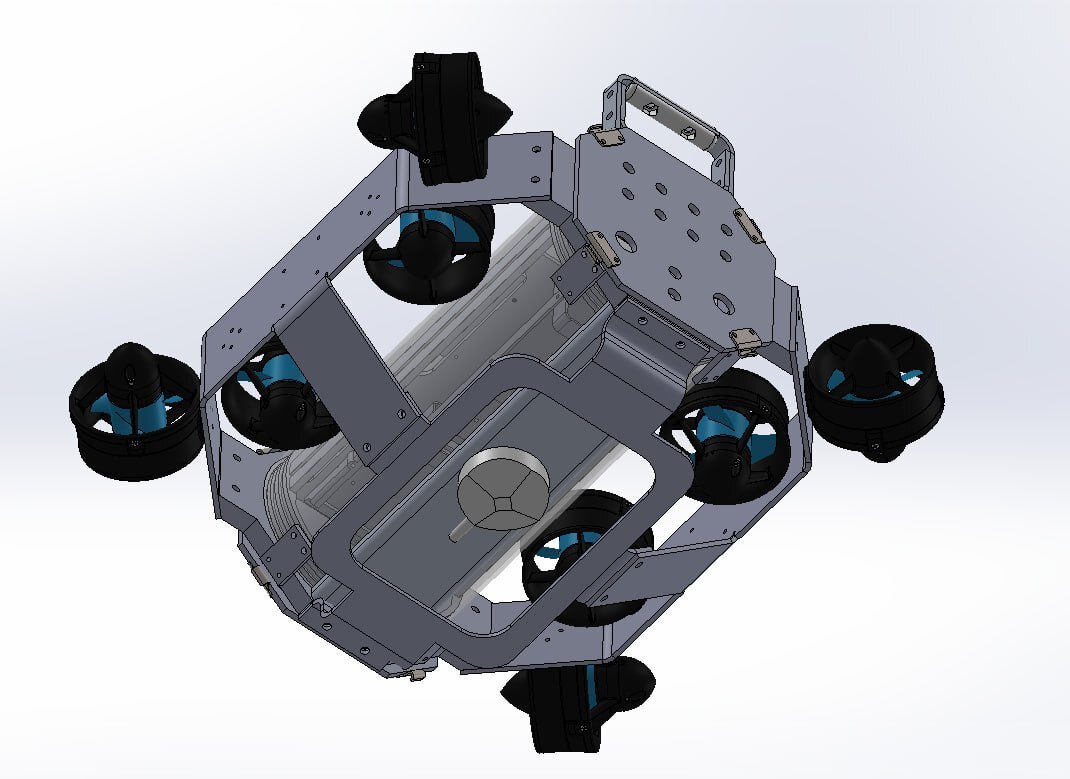
The Mini-AUV is a lightweight and compact platform designed for high mobility tasks at RoboSub. With an 8-thruster configuration enabling full 6 Degrees-of-Freedom control, it excels in maneuvers requiring agility. Its simplified structure also makes it an ideal testbed for rapid sensor integration, allowing the team to evaluate new hardware with minimal overhead.
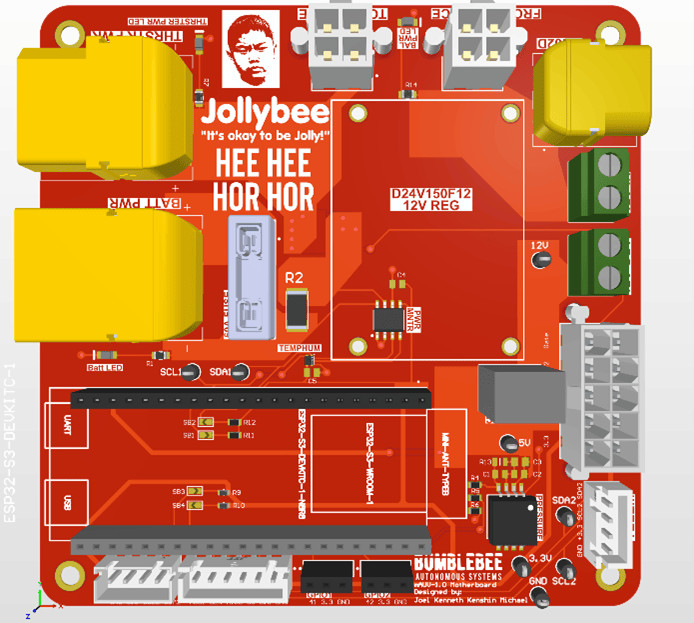
Electrical Sub-System
The electrical architecture is vastly simplified from that of our flagship AUV to meet the tight development timeline. At its core, a main motherboard handles the power distribution and displays key vehicle stats to operators. A second thruster board is then integrated on top of the end-cap to facilitate easy cable management for thruster cables and quick access to its internals.
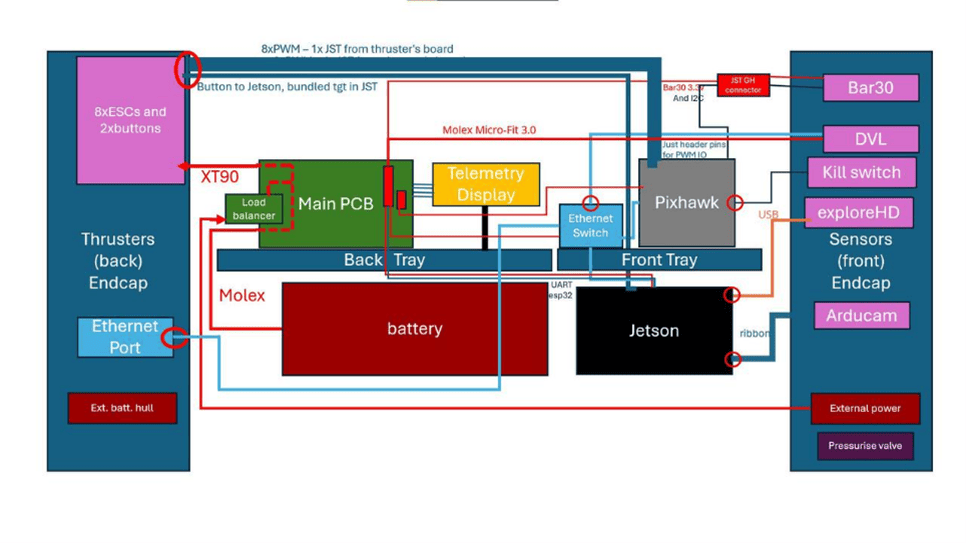

Software Sub-System
The Mini-AUV software stack leverages the ArduSub firmware and MAVROS for control and localization. This platform acts as a testbed for new sensors, allowing us to evaluate the durability and performance of the DWE underwater camera and our new A50 DVL.
Additionally, we decided to use the Pixhawk 6X flight controller with the ArduSub firmware for an integrated solution to the robot’s localization and controls.
