System Overview
Mechanical Sub-System
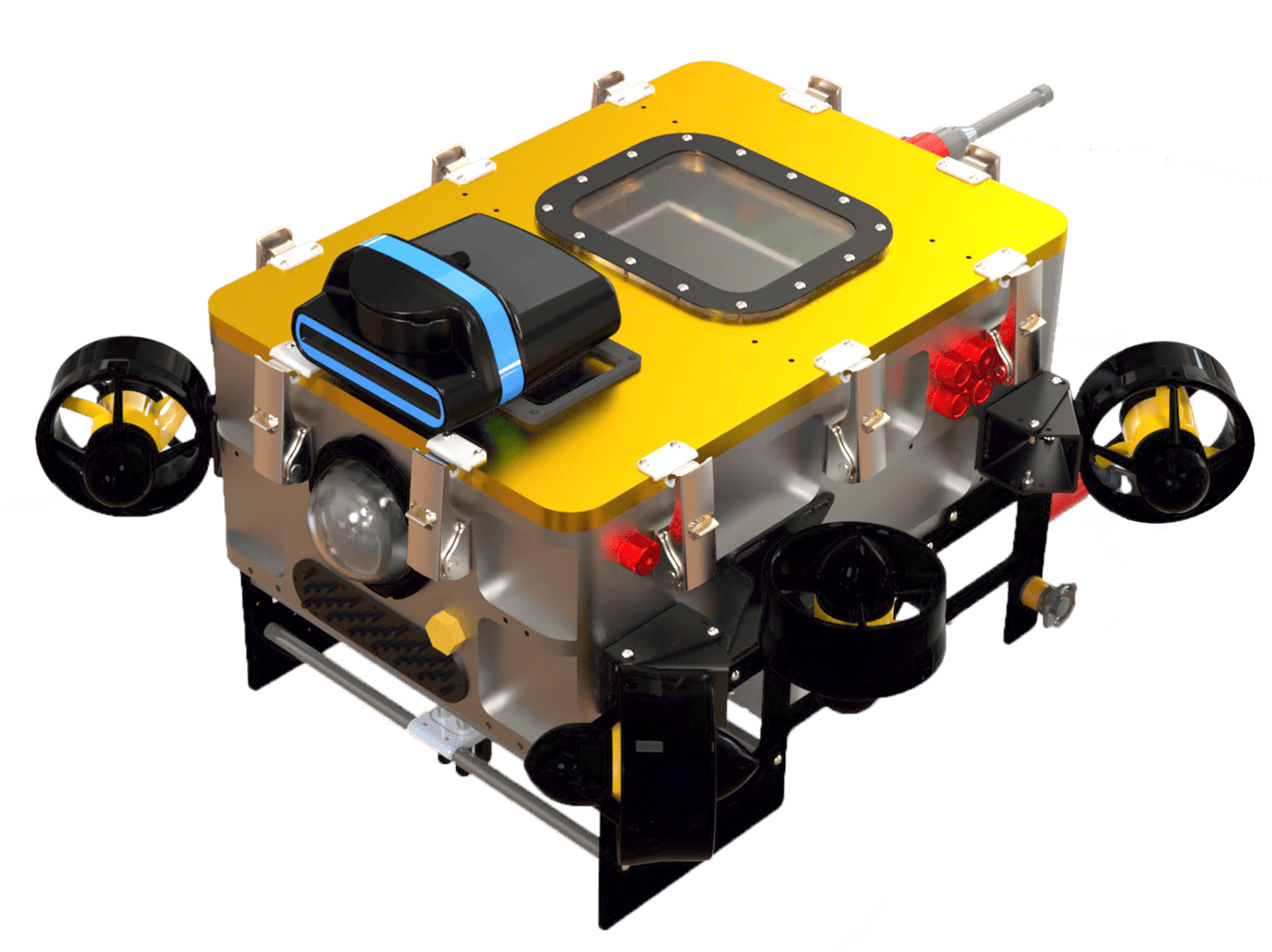
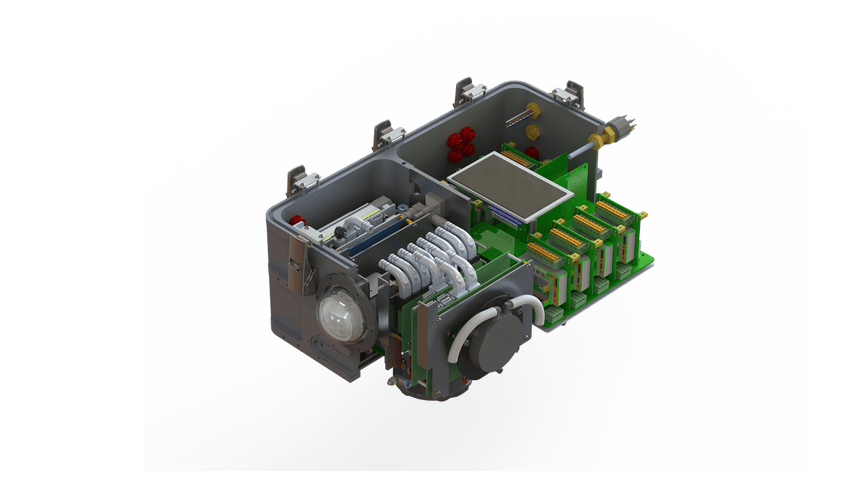
The AUV has been redesigned from the ground up to be significantly smaller and lighter. The main hull has been reworked into a rectangular shape to maximise space usage, and the innovative slot mounting mechanism allows easier access to electrical components for simpler troubleshooting. Additionally, an internal aluminium wall provides structural support and aids in isolating electrical noise.
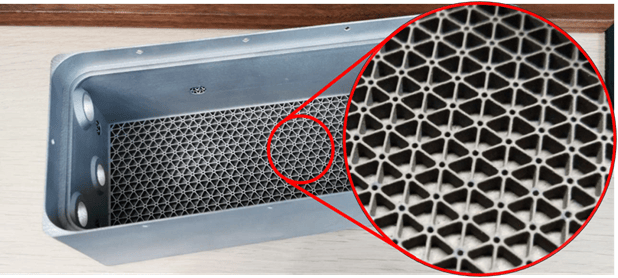
The battery hulls were also overhauled to fit the batteries exactly, minimising internal space wastage. The hulls were custom manufactured using novel 3D metal printing technology, and uses an internal lattice and isogrid patterns to significantly increase the rigidity-to-weight ratio.
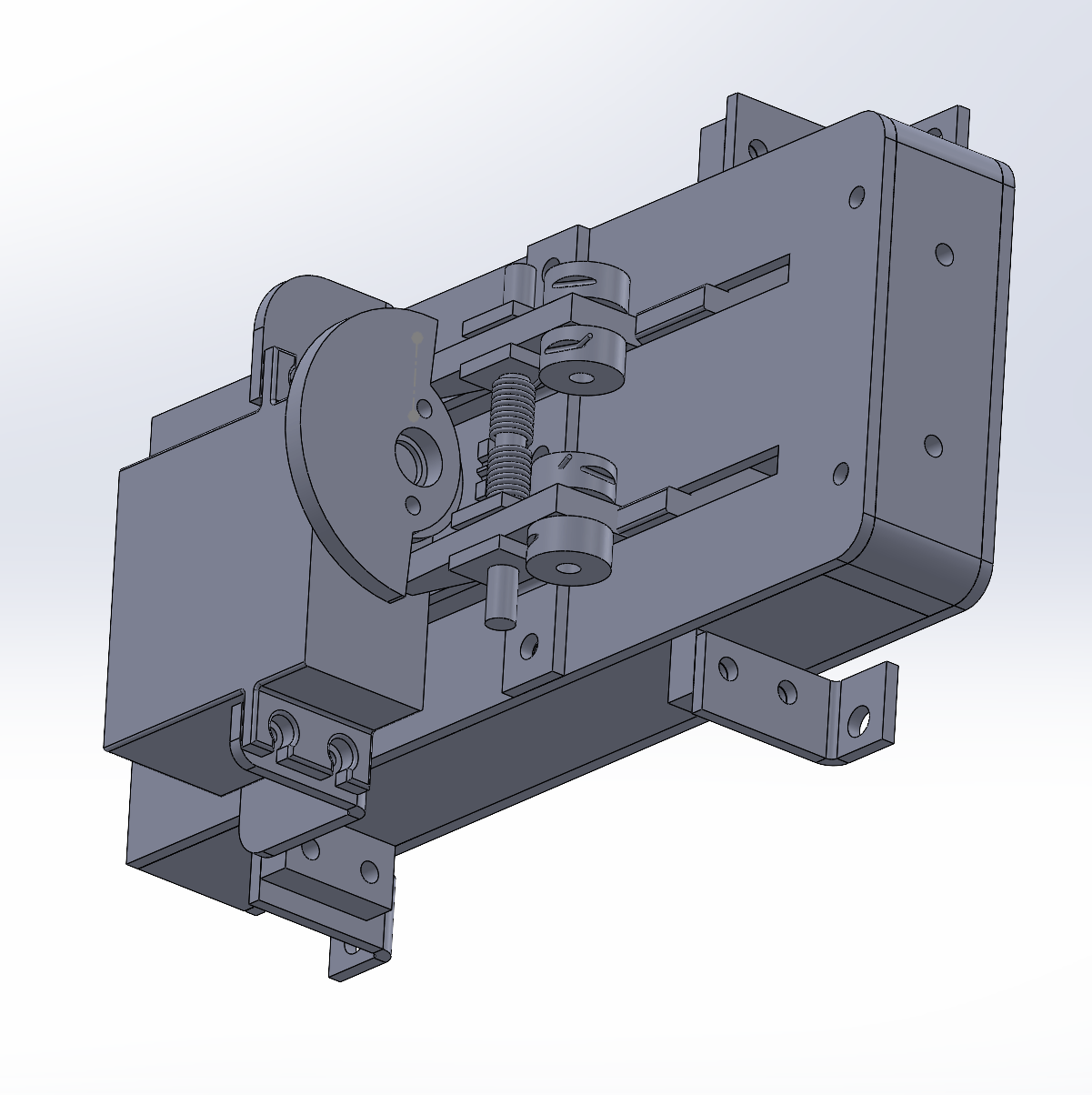
Other improvements include replacing the pneumatic actuation system with an electrical design to reduce weight, footprint and maintenance time and developing a custom RGB lighting system to provide real-time, at-a-glance feedback of the vehicle’s state.
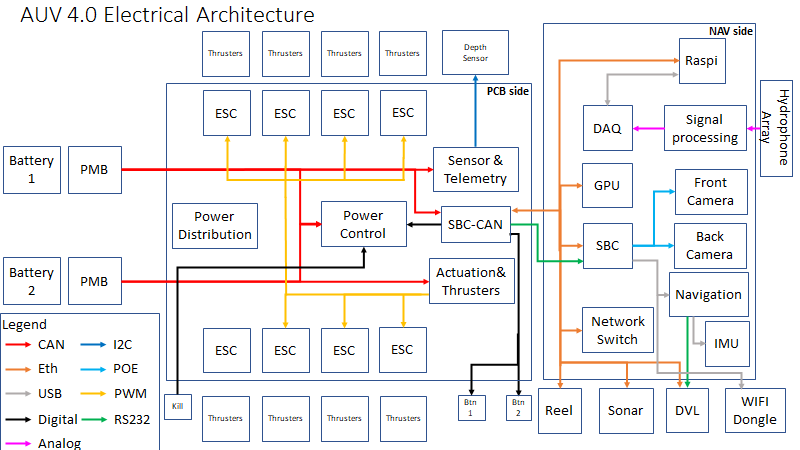
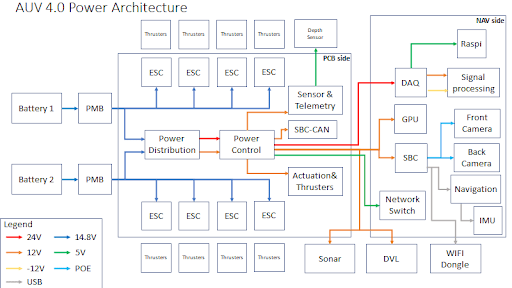
Electrical Sub-System
A new backplane design was adopted to allow for segregation of the low and high level circuitry into sections using multiple backplanes. This allows easy access to the circuit boards for maintenance without being obstructed by other internal components. Decoupling the backplanes also allows for easier troubleshooting due to the ability of each system to function independently, and isolates electrically sensitive equipment from electrical noise generated by other electronics, increasing the accuracy of sensor measurements.
The existing CAN system was also overhauled to use STM32 microcontrollers instead of the previous ATMega microcontrollers. This greatly simplified the design and space required, and improved the data rate by 75%.
A new Ethernet controller was also added to interface between the higher and lower level systems, allowing us to maintain control over the vehicle in the event of SBC failure.

Software Sub-System
A unified control architecture was developed to increase the modularity of the existing navigation stack. The new navigation stack allows for high-level control strategies for path planning and path following to be re-used easily across multiple vehicles.
This modularised architecture allows for a cleaner separation of code for high-level and low-level control of the AUVs, supporting rapid testing and implementation of different low-level control strategies and thruster configurations for each vehicle.
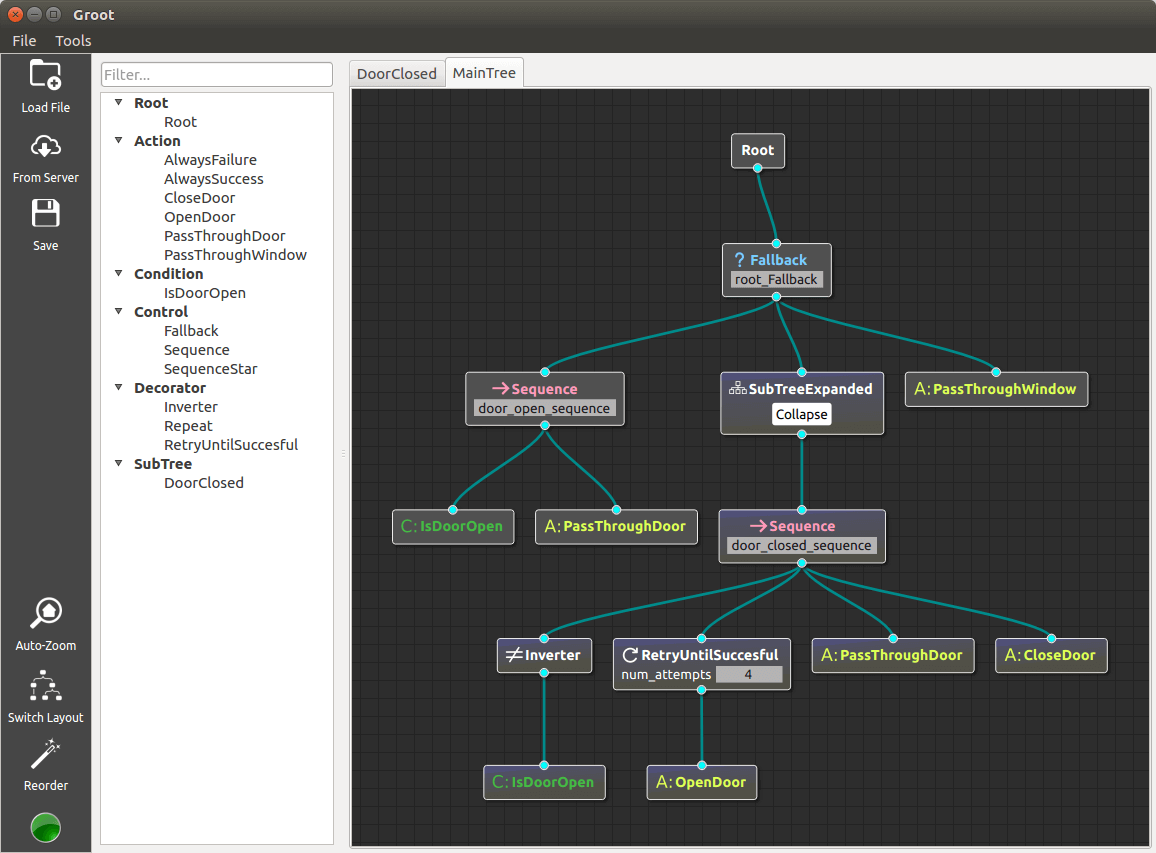
A new behaviour tree based mission planner was also introduced, replacing the traditional Finite State Machine planner. The new mission planner offers greater flexibility and is easier to maintain, due to the linear structure and well-defined transitions between node states in a behaviour tree. The high level of composability and abstraction offered by the behaviour tree also allows us to define increasingly complex robot behaviours with ease, and offers us the ability to change behaviours and parameters at runtime without requiring code recompilation, saving precious time in competition settings.
Competition Strategy
For RoboSub 2021, we aim to simultaneously deploy the BBAUV 3.99 and the BBAUV 4.0 to complete tasks efficiently, assigning each vehicle the tasks they are more suited for. If time permits, the vehicles will also swap their assigned tasks and attempt to get a better score. To facilitate this dual-vehicle strategy, we developed an inter-vehicle communication system to communicate the active task and current locations, to ensure maximum efficiency and collision avoidance.
For the individual tasks, we make use of a sensor fusion approach, utilising advanced techniques such as structure from motion in our vision pipeline. We also leverage our position-based PID controller to accurately position our vehicle and manipulate the task objects. Bringing together these task-specific strategies is our new Behaviour Tree based mission planner, which offers numerous advantages over traditional Finite State Machine based mission planners, such as a more linear structure and well-defined transitions, allowing for much easier interpretation of the vehicle’s behaviour.
For more details, read our technical paper.
