System Overview
Mechanical Sub-System
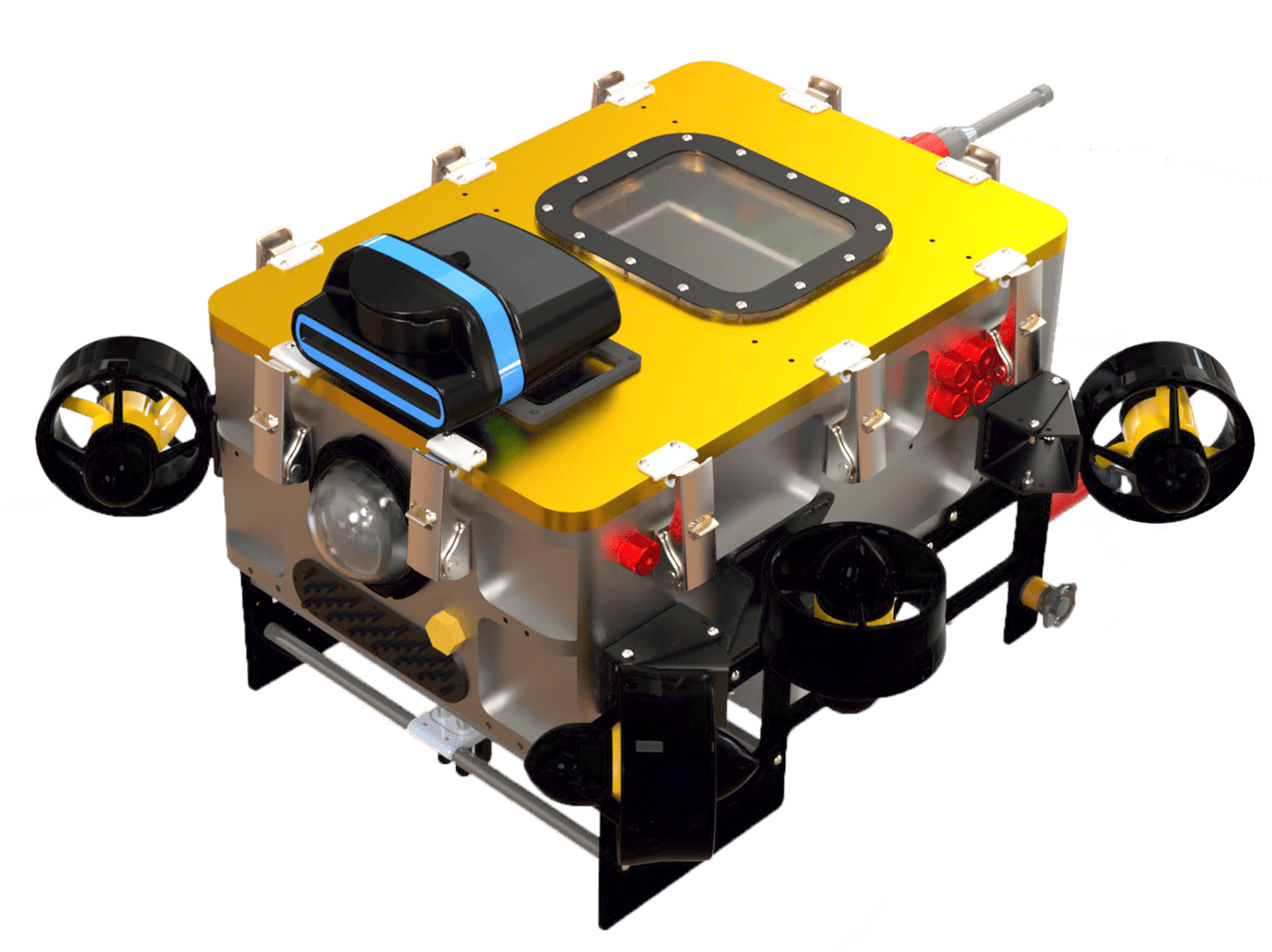
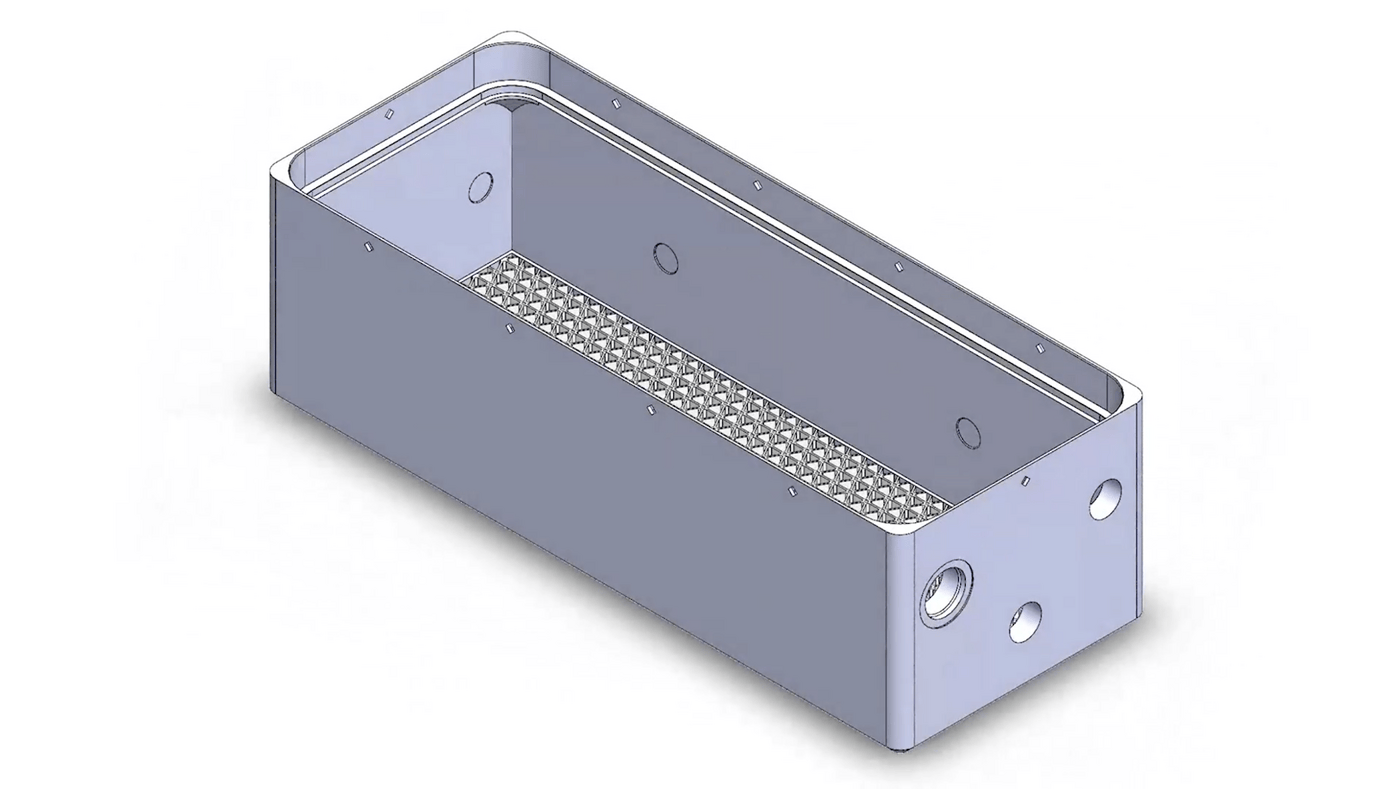
The AUV has been redesigned from the ground up to be significantly lighter. The main hull has been reworked into a rectangular shape to maximise space usage and allow easier access to electrical components for simpler troubleshooting. Additionally, an aluminium partition wall provides structural support and aids in isolating electrical noise.
The battery hulls were also overhauled to fit the batteries exactly. The hulls were custom manufactured and uses an internal lattice and isogrid patterns to significantly increase the rigidity to weight ratio.
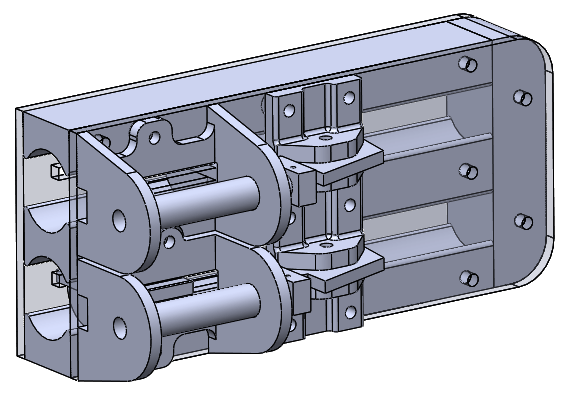
Lastly, the previous pneumatic actuation system was replaced with an electrical design that reduces the weight and improves usability.
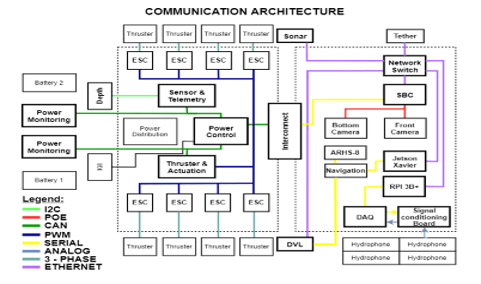
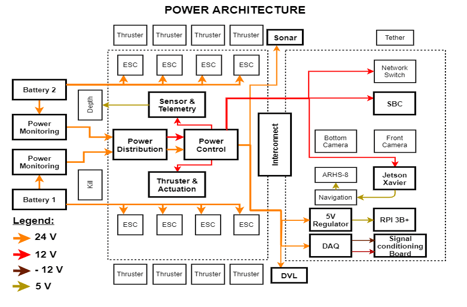
Electrical Sub-System
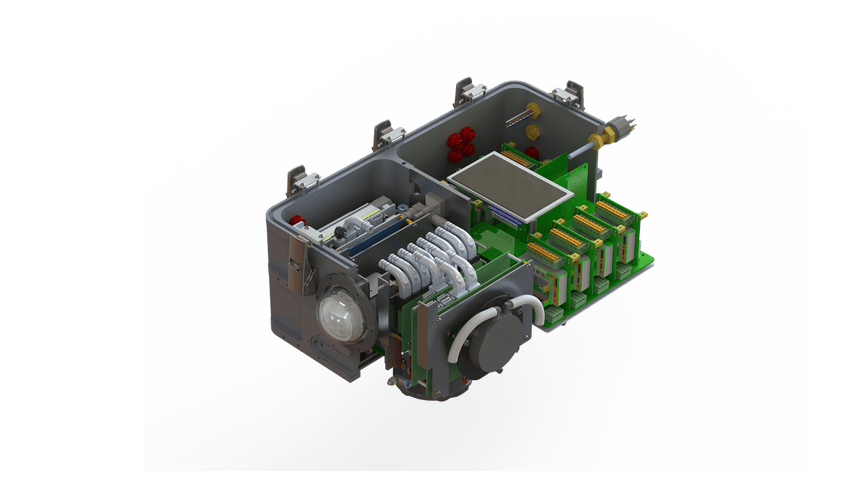
A new modular design was introduced that utilises multiple backplanes in two sections, one consisting of low level circuitry, and another consisting of high level circuitry. This allows sections to be easily removed without having to take apart the vehicle, and simplifies debugging due to the independent nature of the sections. The separated backplane also allows for greater physical isolation of electrical components.
The existing CAN system was also overhauled to use STM32 microcontrollers instead of the previous ATMega microcontrollers. This greatly simplified the design and space required, and improved the data rate by 75%.
A new Ethernet controller was also added to interface between the higher and lower level systems, allowing us to maintain control over the vehicle in the event of SBC failure.

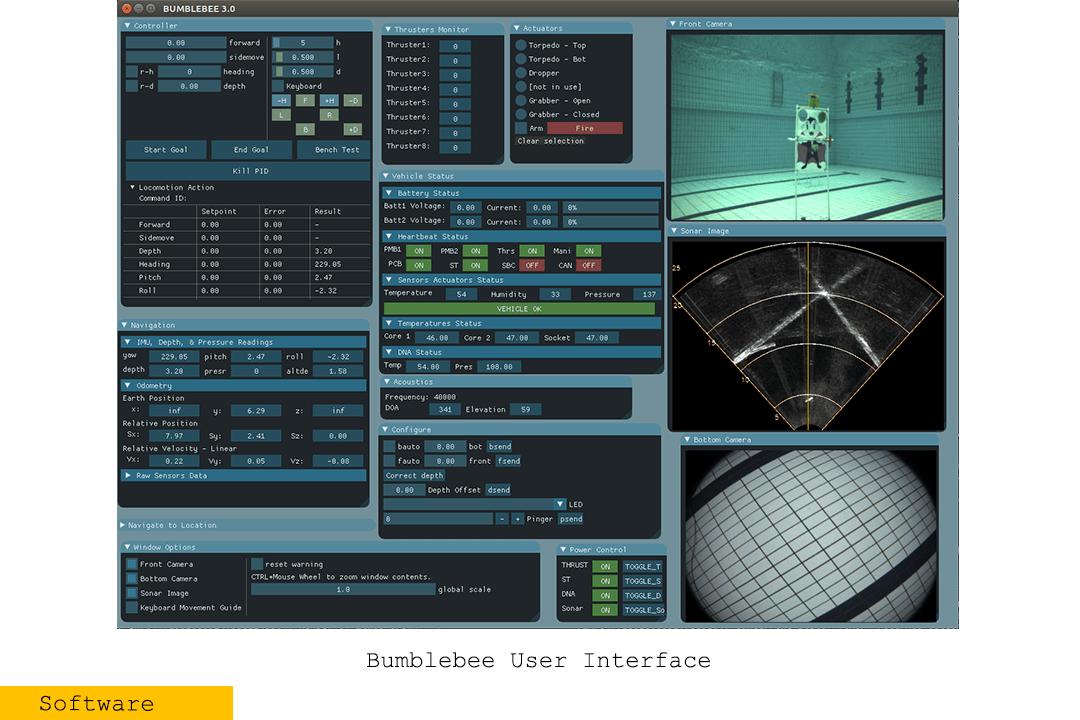
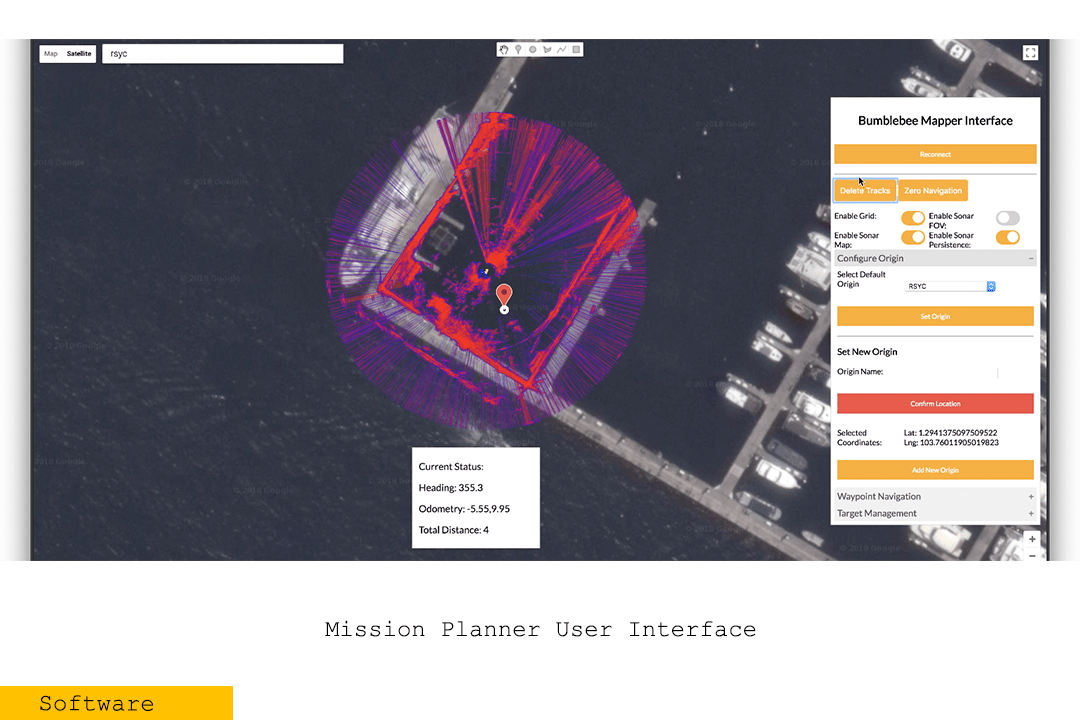
Software Sub-System
A unified control architecture was developed to increase the modularity of the existing navigation stack. The new navigation stack allows for high-level control strategies for path planning and path following to be re-used easily across multiple vehicles.
This modularised architecture allows for a cleaner separation of code for high-level and low-level control of the AUVs, supporting rapid testing and implementation of different low-level control strategies and thruster configurations for each vehicle.
A velocity-based path-following algorithm was also implemented to replace the old pure pursuit tracking algorithm. This allows the vehicle to plan and follow paths with a higher order of control, following a given path more precisely.
