Specs and Upgrades
Mechanical Sub-System
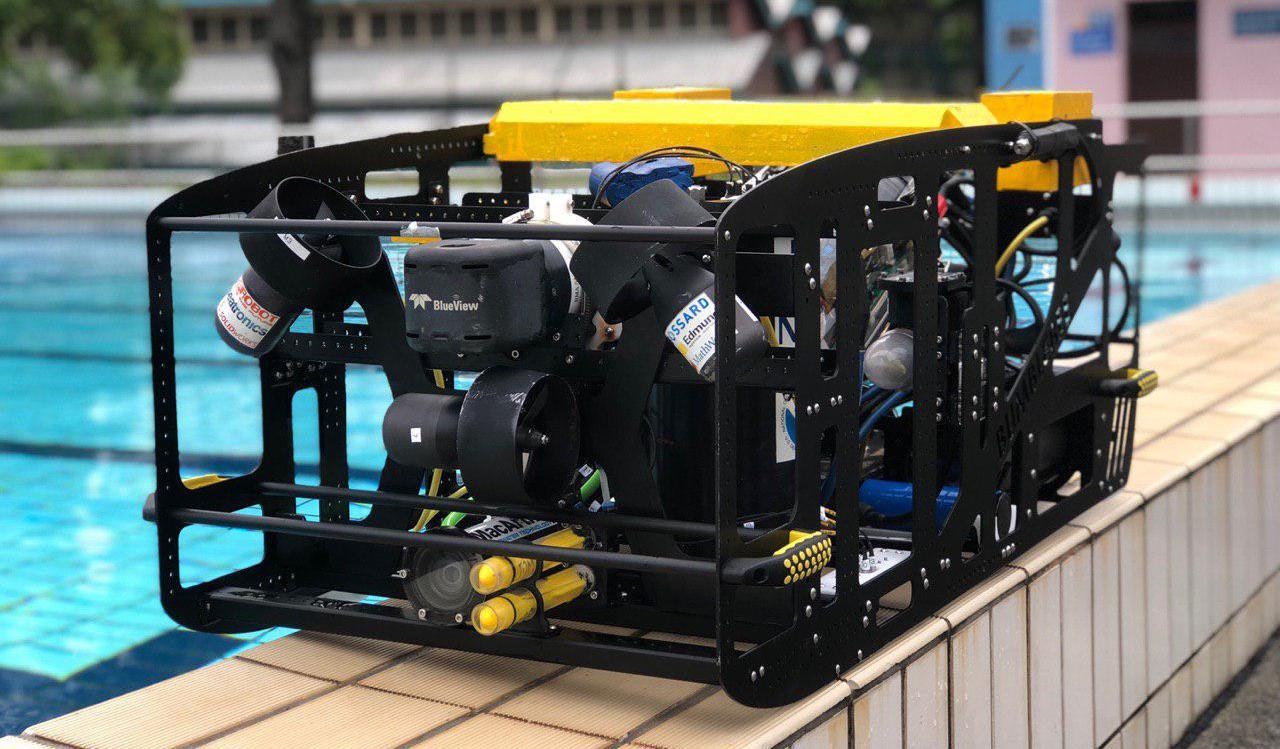
We have redesigned a new aluminum frame that resolves the unstable vehicle behavior observed from last year. Additionally, the new aluminum frame protects all of the vehicle’s components, especially the thrusters, from collision against external objects.
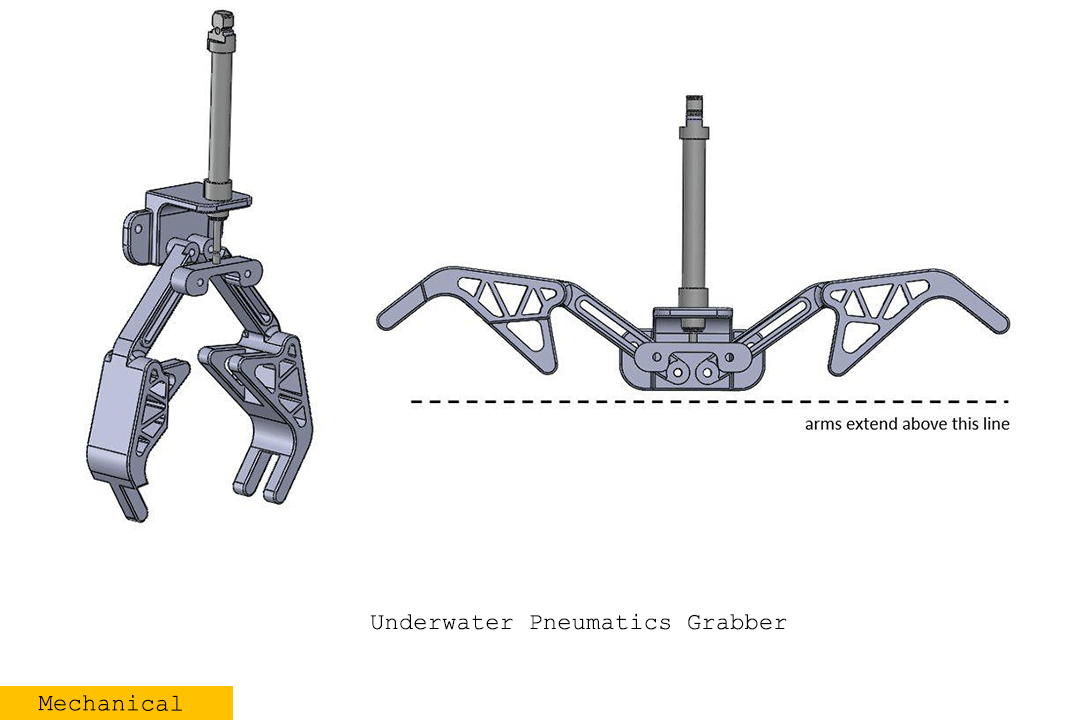
Due to the difficulty of this year’s RoboSub Tasks, we redesigned a pneumatic claw grabber from RoboSub 2017 to have a wider gripping range.
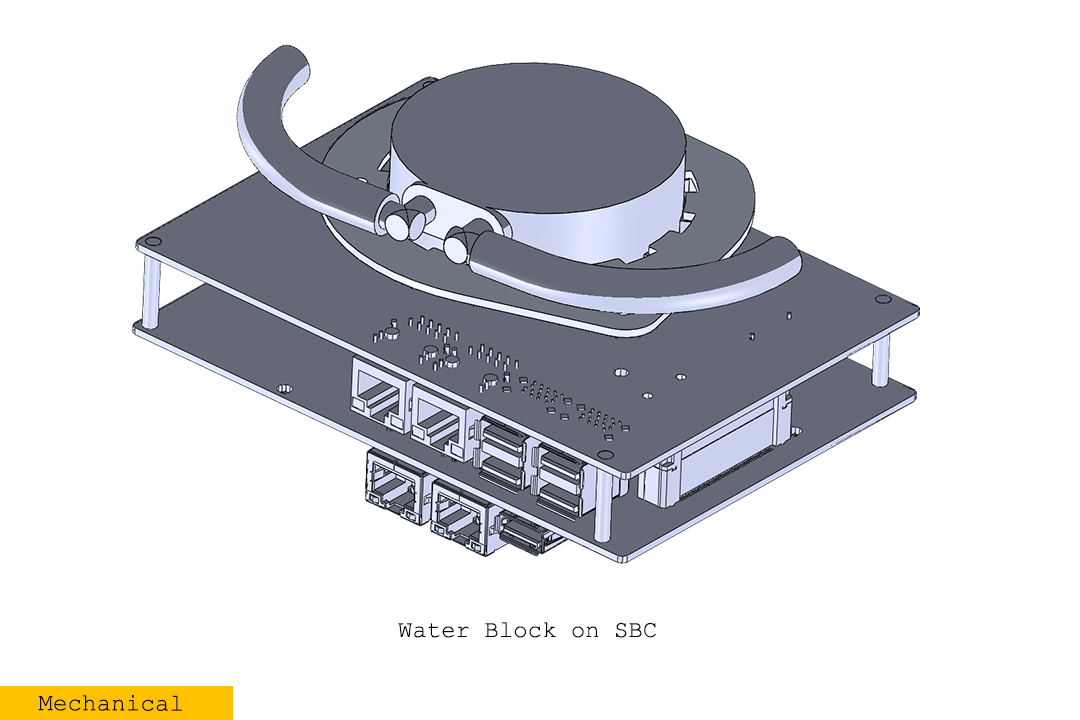
Liquid cooling system for SBC was also upgraded with a pump-block combo, modified from an all-in-one liquid cooler.
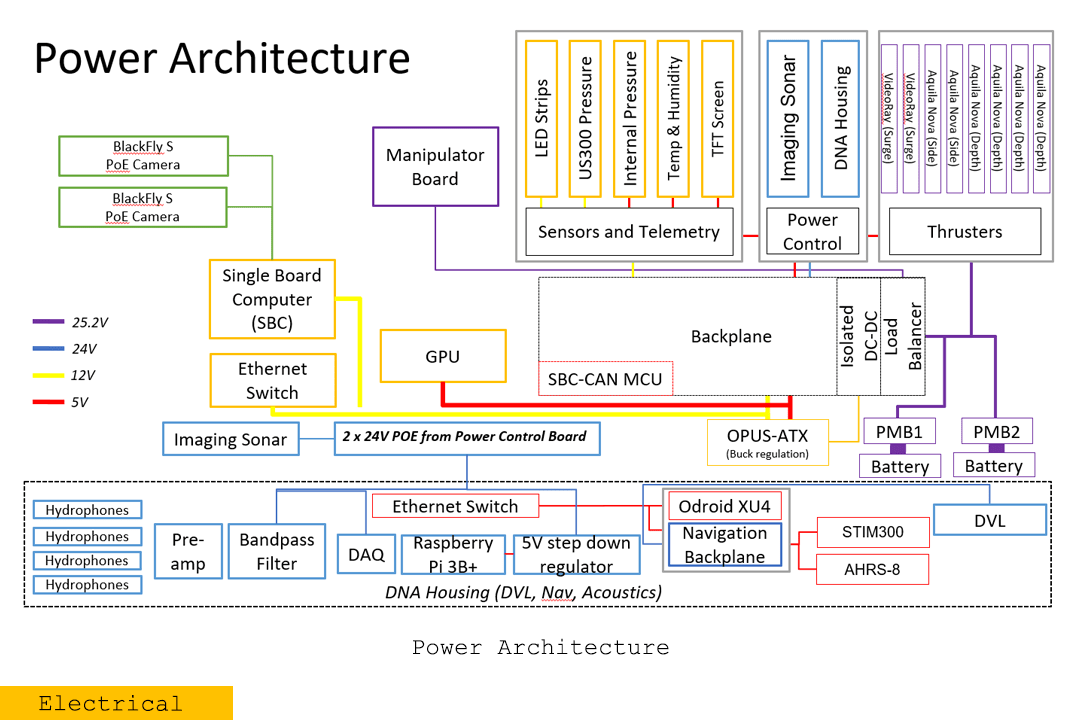
Electrical Sub-System
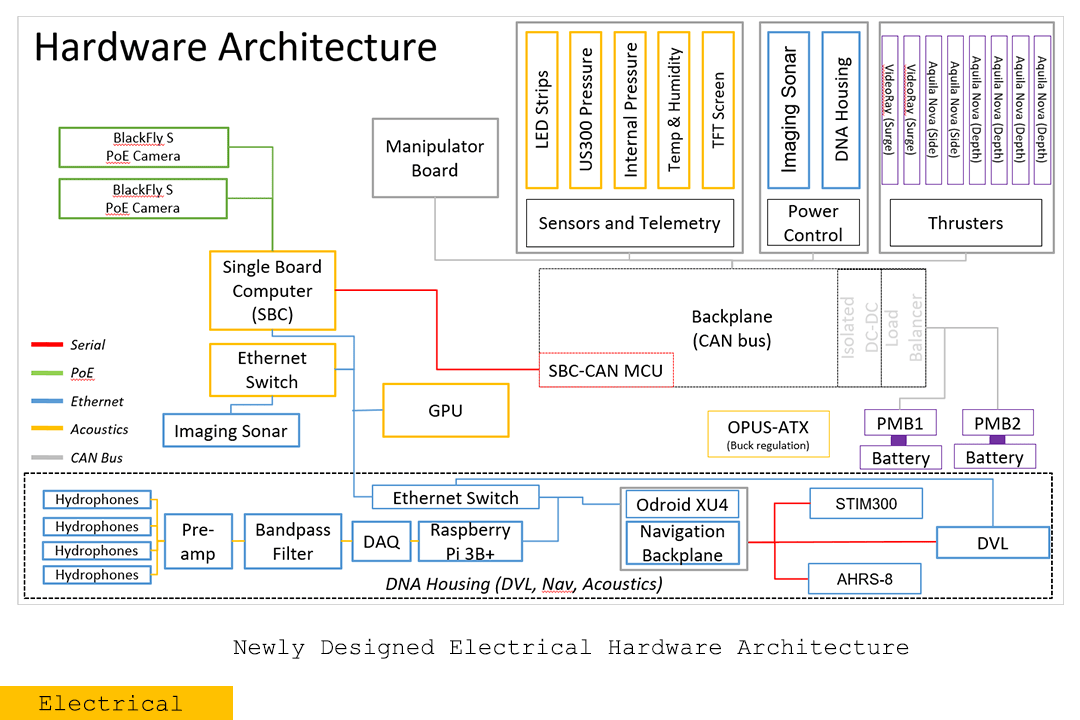
We have upgraded the acoustics sub-system from the original sbRIO to a custom signal conditioning board, data acquisition (DAQ) board and raspberry pi 3B+ for localization of signals.
A GPU (Jetson Nano) was added into the main system for higher graphics processing power.
Two 12000mAh batteries which increases 20% more than our previous battery capacity.
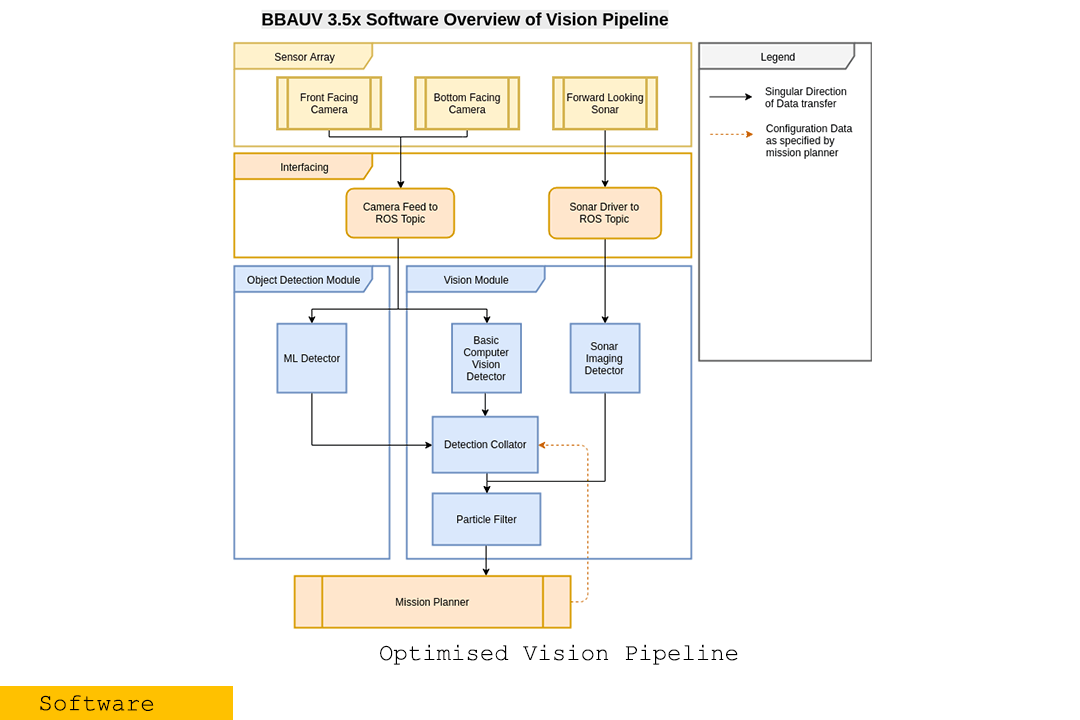
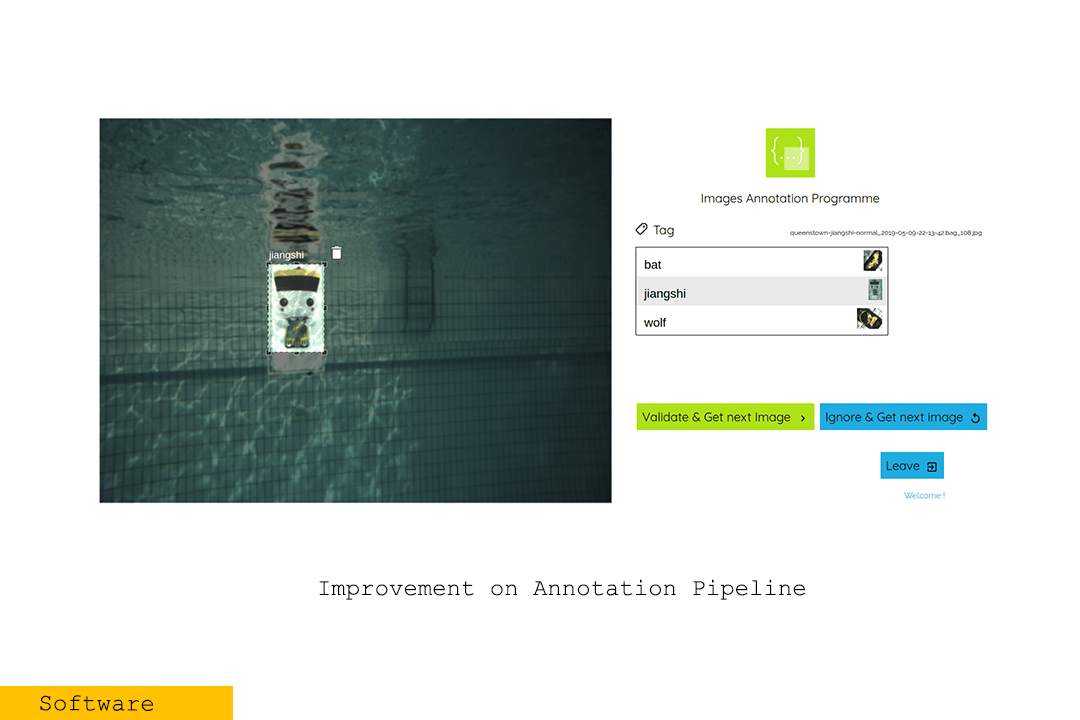

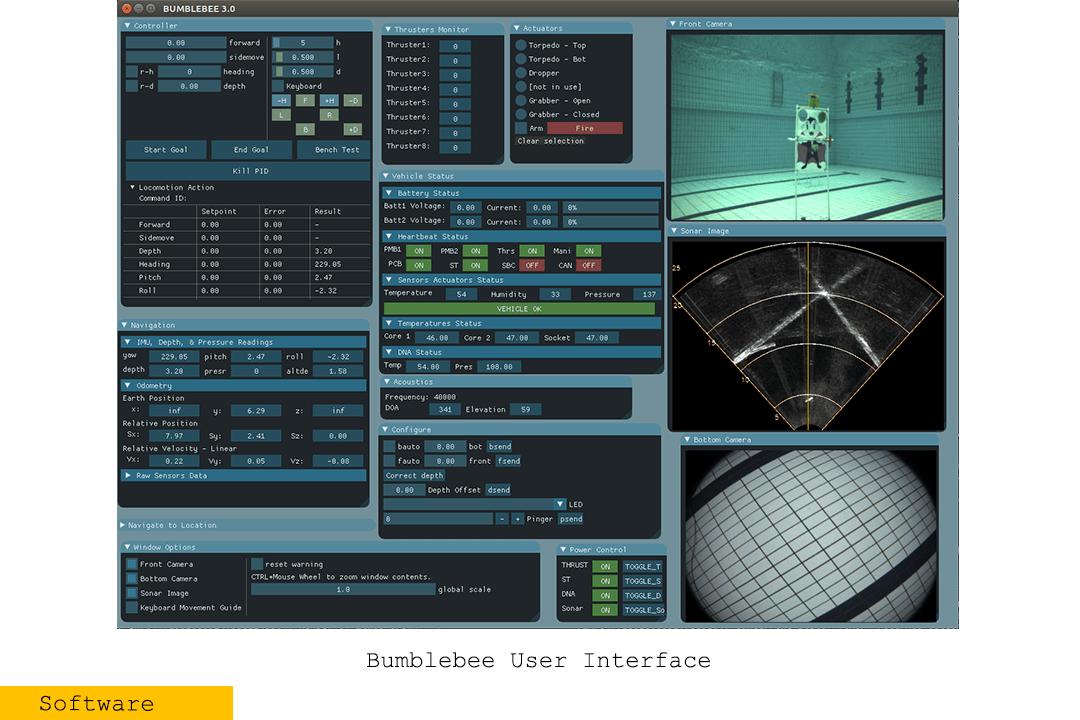
Software Sub-System
We have integrated a separate deep learning node into our existing vision pipeline to allow for faster deep learning inferences for object detection. The annotation pipeline for labeling and training images has also been revamped with a new web annotation tool that allows for seamless multi-user annotations.
