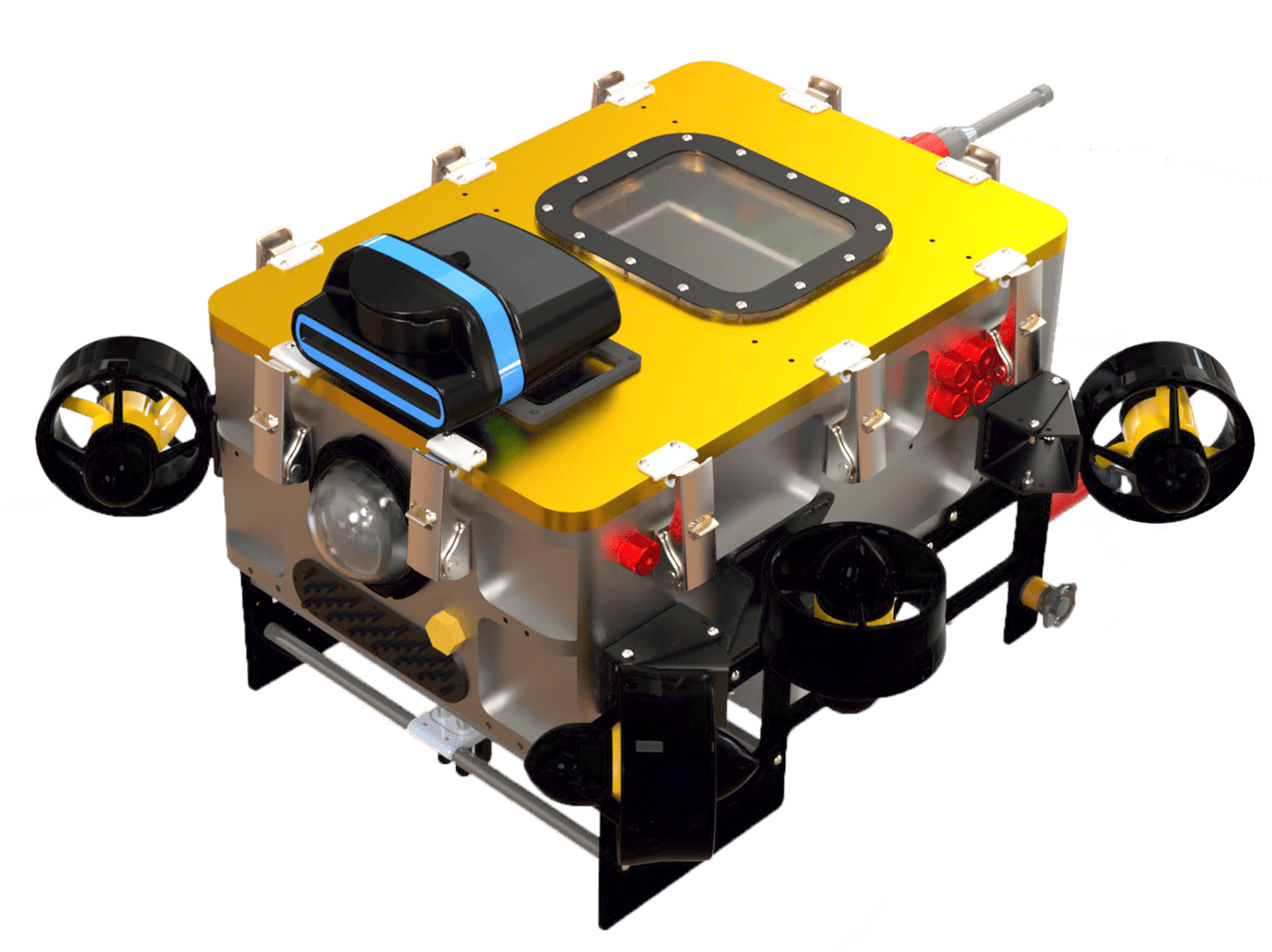
Bumblebee AUV 4.0 has been completely redesigned from the ground up to reduce its weight and footprint by half, compared to its predecessor. The new propulsion system features 7 BlueRobotics T200 thrusters that allow it to achieve all 6 degrees of freedom (DOF). However, despite the substantial improvements in weight and size, it still manages to retain all the capabilities of the 3rd generation AUV 3.5X.
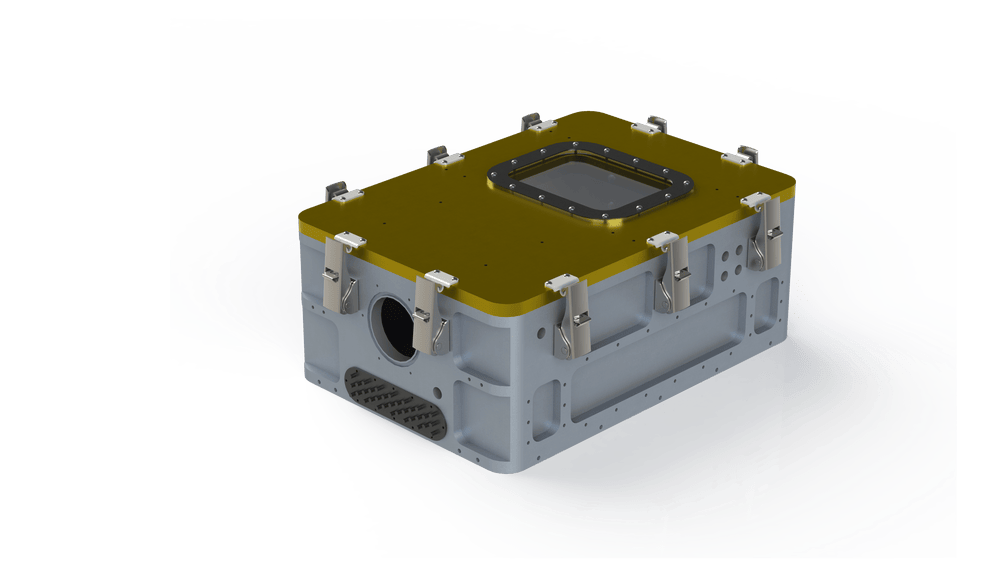
Main Hull
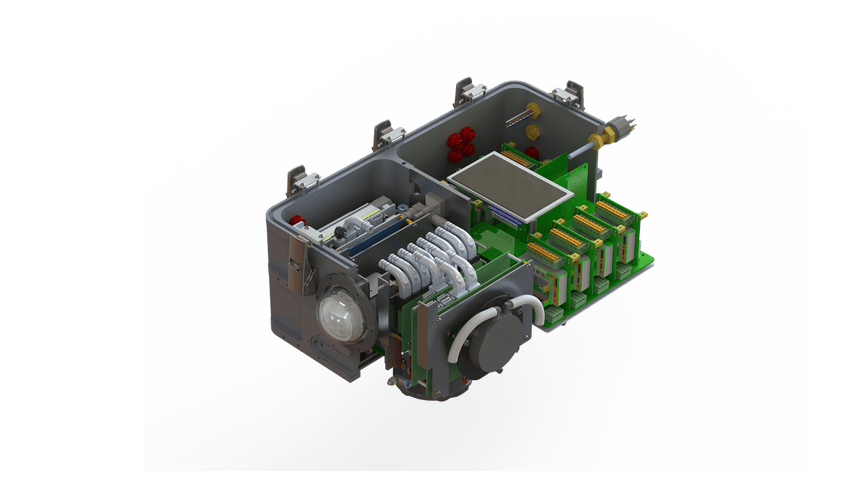
Our new hull is fabricated by Computer Numerical Control (CNC) machining of aluminium. This design eschews the conventional circular hulls of our previous vehicles, instead opting for a more boxy rectangular shape. The rectangular hull helps to increase the packing efficiency of the rectangular PCBs in the main hull, consolidating the majority of the components into a singular hull.
The hull separates the power handling components from the signal and data processing electronics into 2 compartments. The aluminium partition wall provides structural support to the hull and aids in isolating electrical noise. With our slot mounting mechanism of electrical components, we are also able to get much easier access to each component in the hull for simpler troubleshooting.
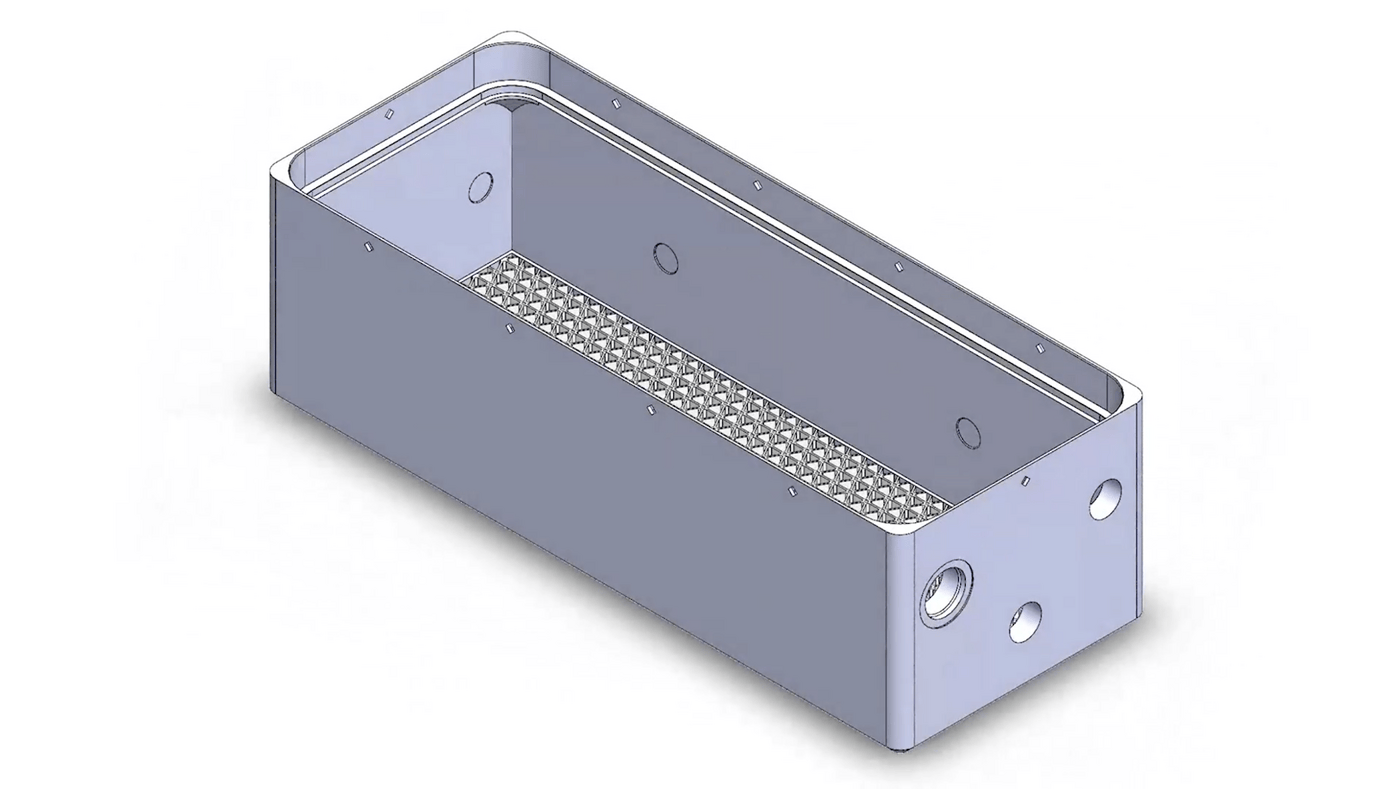
Battery Hulls
For our battery hulls, we were fortunate to be sponsored by SLM Solutions. Using their additive manufacturing method, we were able to utilise internal lattices and isogrid patterns for the walls and base of the battery hull. These internal structures increased the rigidity to weight ratio of the hull, resulting in a significant reduction in both the weight and volume of our battery hulls.
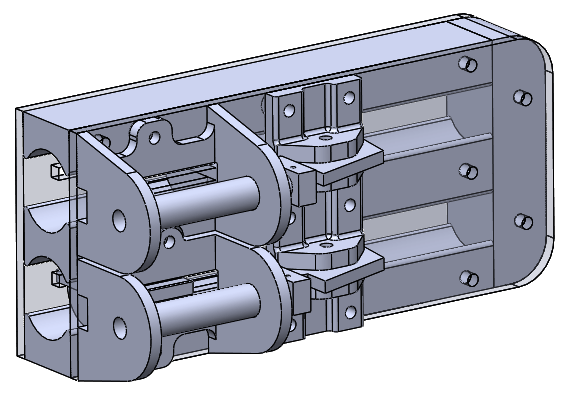
Actuation
Diverging from our previous pneumatic actuators, we have transitioned to a fully electrical actuation system. The torpedo system works with latched internal springs, and are released with electric servos. By eliminating the bulky and heavy pneumatic system, we were able to reduce the footprint and complexity of our actuation system.
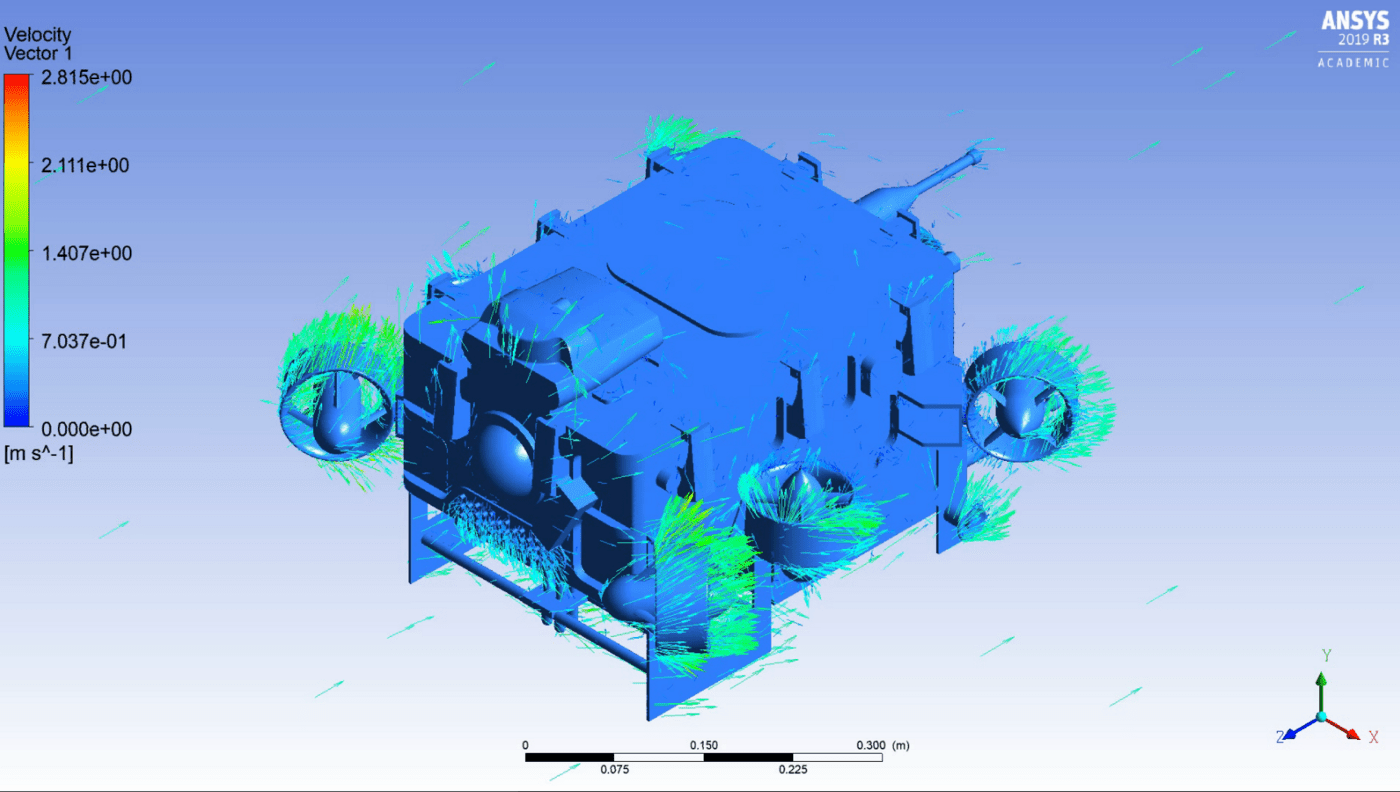
Computational Fluid Dynamics (CFD)
Making use of Ansys Fluent to perform fluid simulations, we were able to obtain the hydrodynamic properties of our vehicle in each degree of freedom. With the information obtained from the CFD analysis, we were able to create more accurate software simulations, enabling us to test our software without access to the physical vehicle in the pool.