
BBAUV 4.5 retains the same hull design and frame as BBAUV 4.1 in a decision to prioritize stability while electrical and software systems undergo major changes. On the other hand, all of our actuators have underwent major changes to better meet the stricter task requirements since we last participated in 2023.
Refurbished Structure
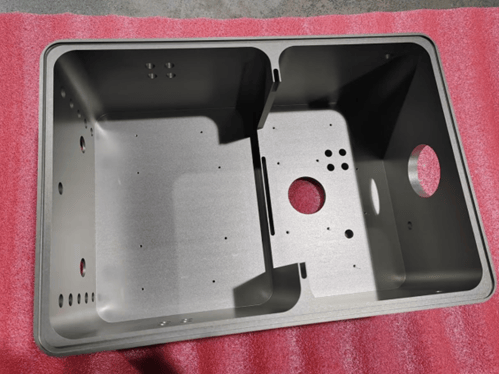
After 4 long years of operation, we have remanufactured the hull, floats and frame as they have begun to show signs of corrosion and damage. Additional penetrator holes were designed to provide flexibility in integrating new components. The new hull also features the use of Blue Robotics WetLink Penetrators, an improvement in reliability from having to rely on potting for the old penetrators.

Jaw-Dropping Markers
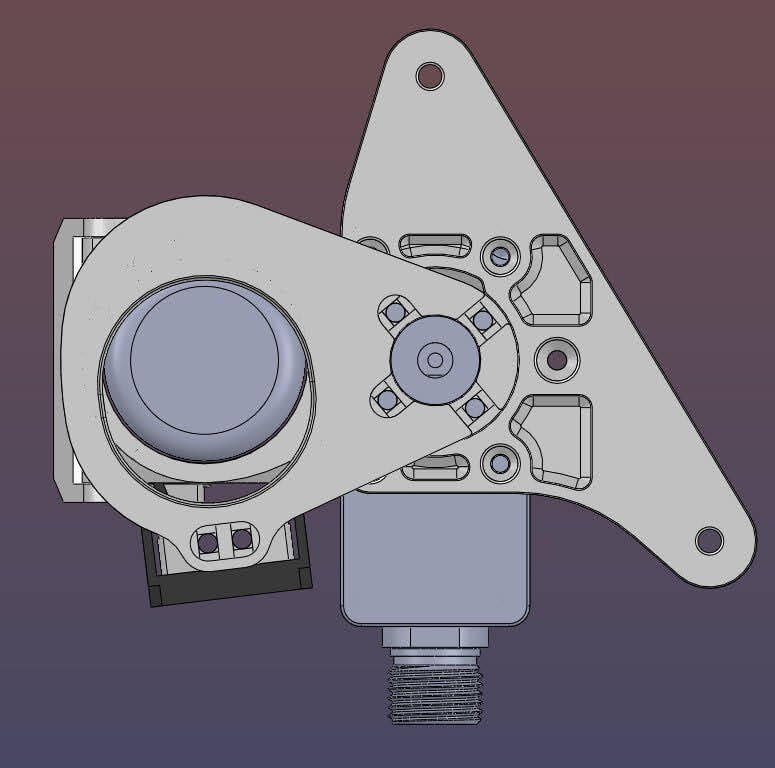
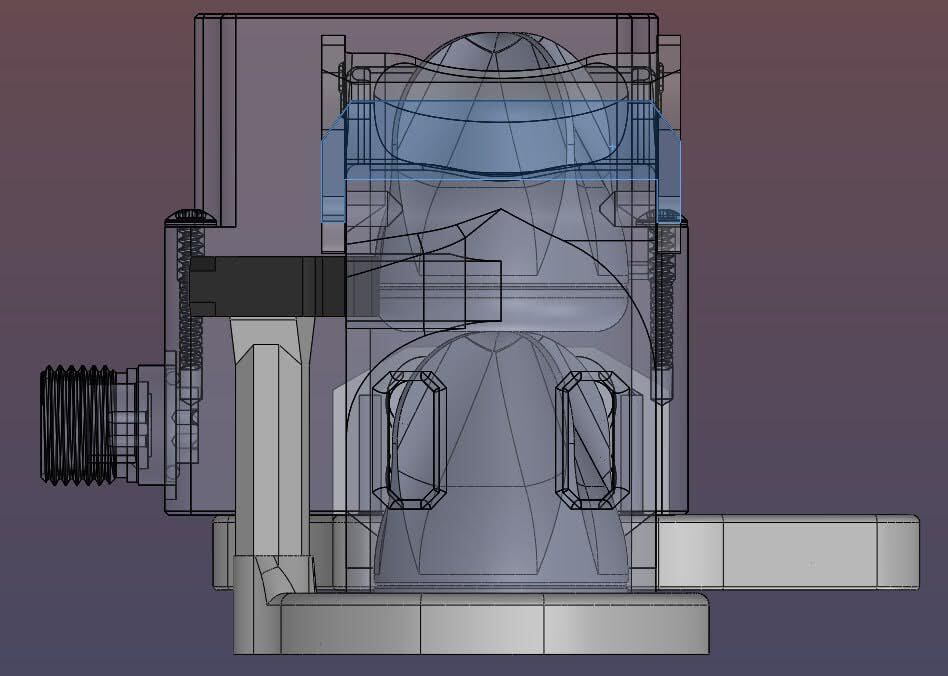
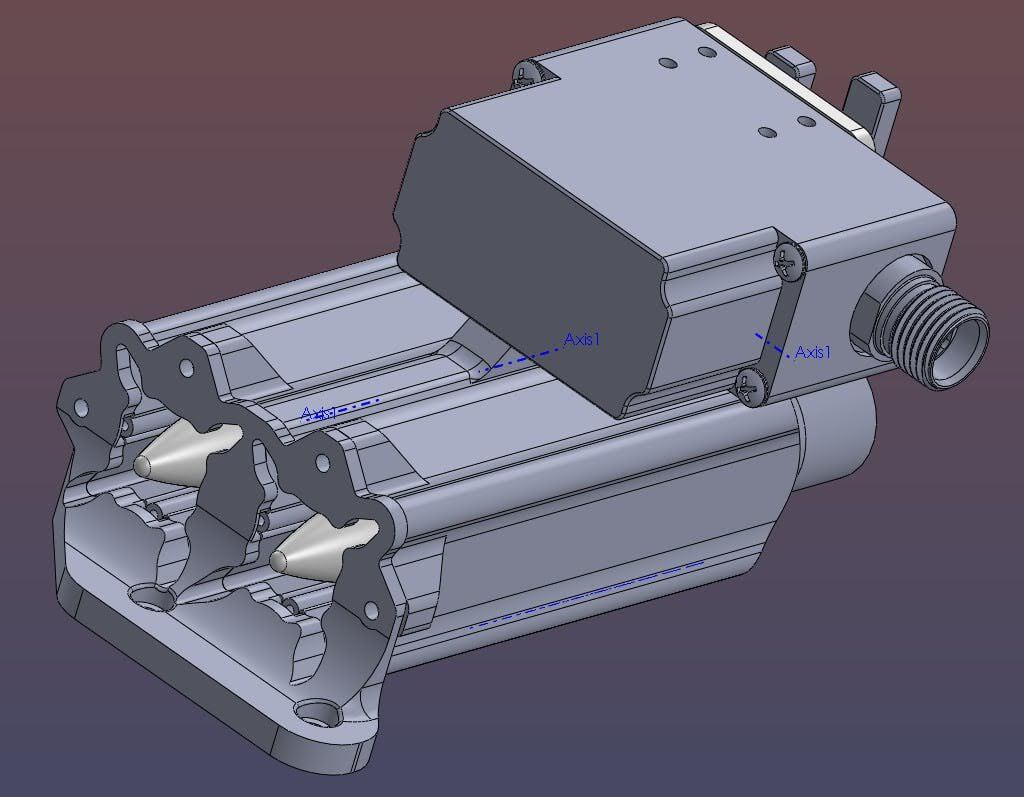
Similar to the torpedo launcher, our dropper has been redesigned to operate with new underwater servo motors. We have also designed a custom marker this year, which reduces drifting, bouncing or rolling once dropped to improve reliability. With a more barrel-like marker, it allows for a gripper-style indexing system, enabling the design to be miniaturized for easier maintenance and mounting.
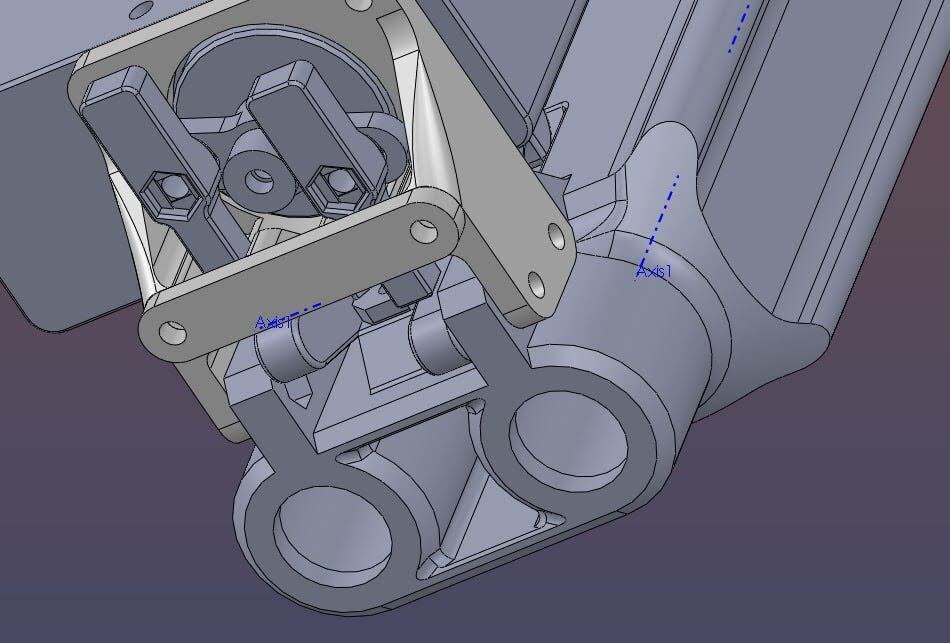
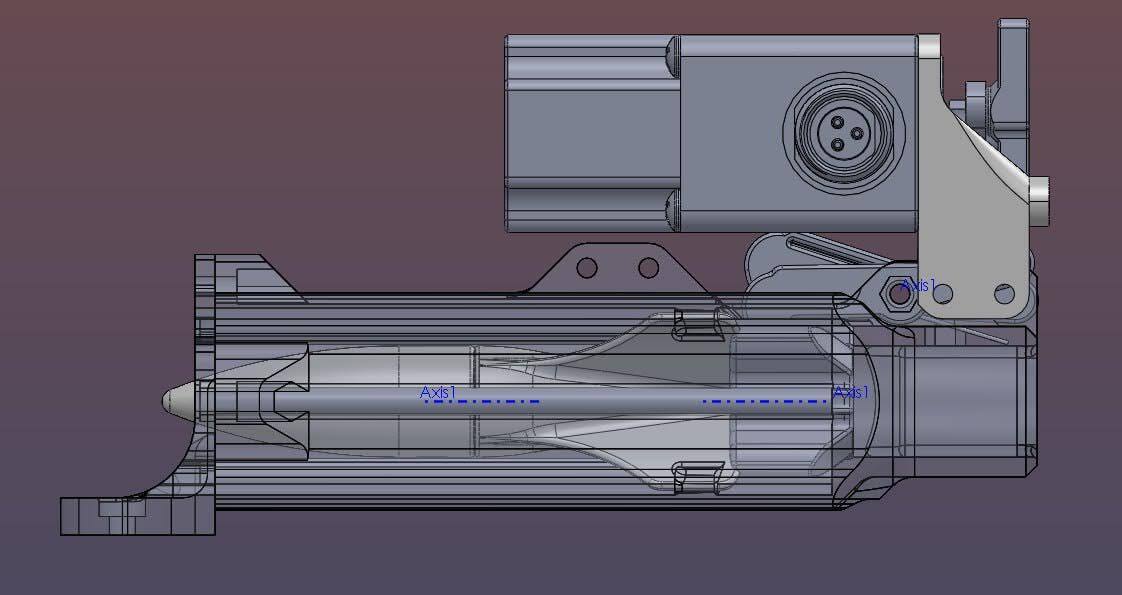
Firing from Range
The torpedo’s geometry was refined through CFD simulations with a focus on improving stability and efficiency. By strategically shifting the center of pressure behind the center of gravity, the design promotes natural self-correction along its trajectory when fired. The overall profile was optimized to minimize drag, enhancing travel distance and speed. The nose geometry was also redesigned, where shaping was adjusted to reduce high-pressure zones and smooth out flow separation. This is complemented with a redesigned launcher lined with teflon tube to reduce drag and slop, minimizing wear on the tube and the torpedo itself.
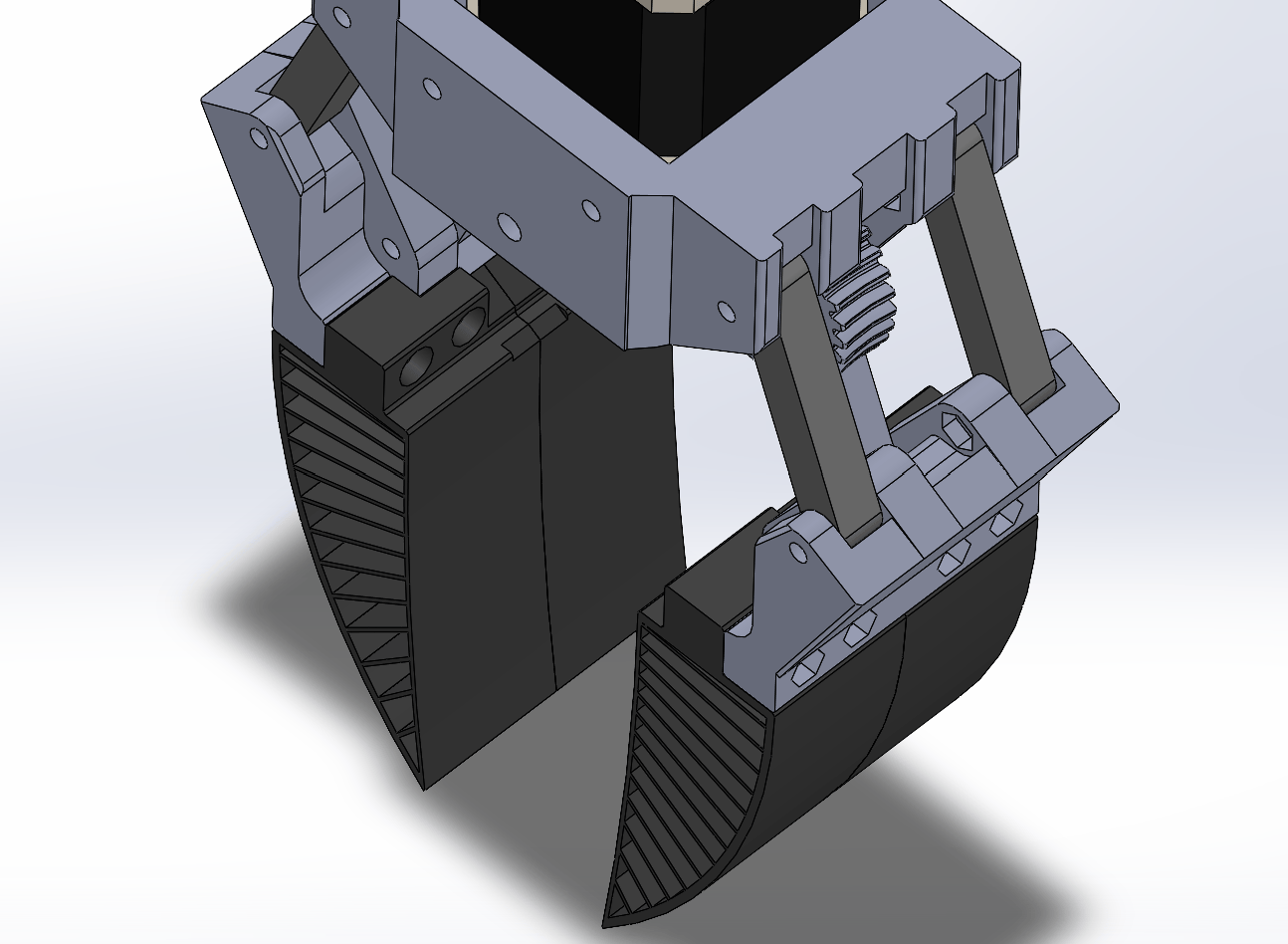
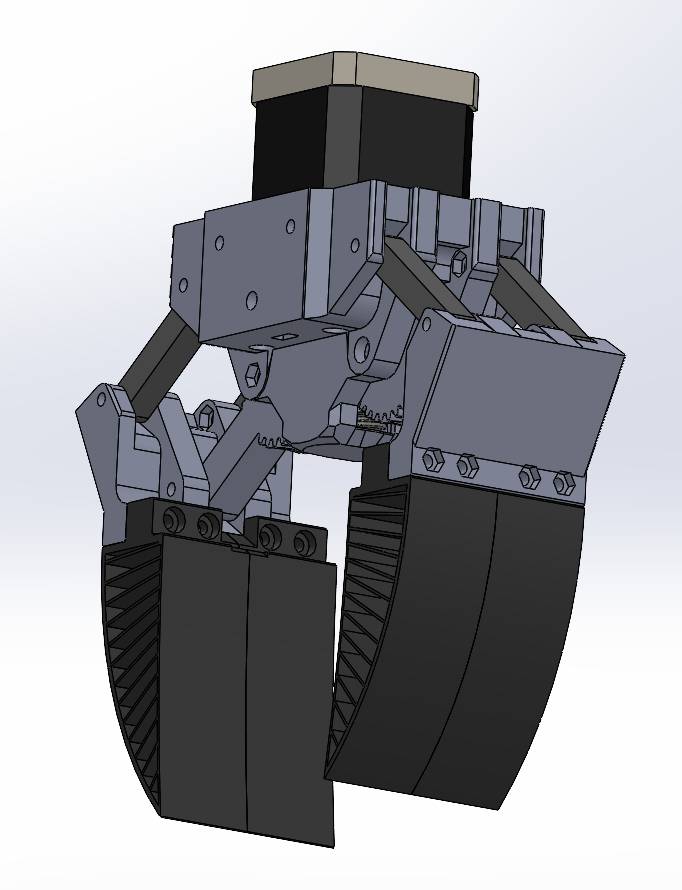
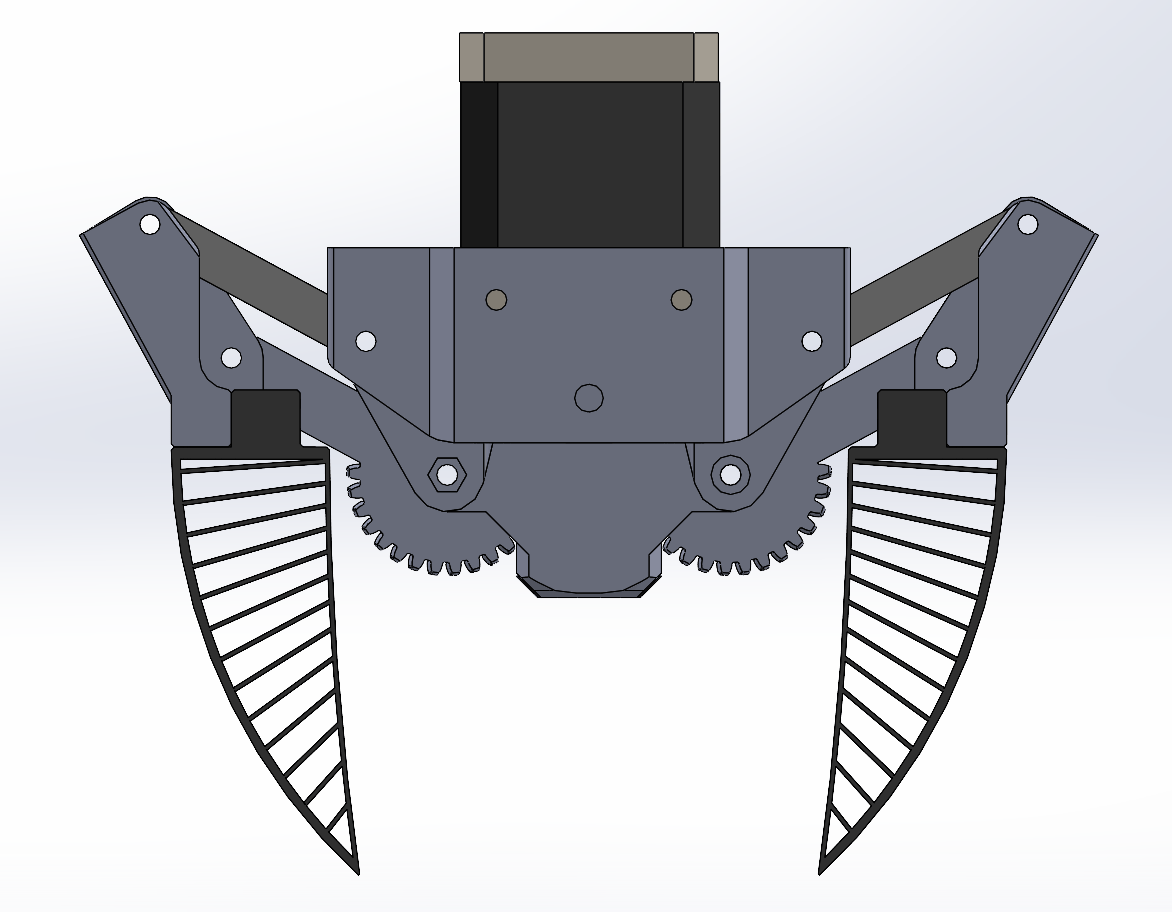
Adaptive Gripper
We have refined the soft fingertips of the previous grabber. This iteration is designed with a Finray structure and printed using TPU, to enhance the grabber’s versatility. We also upgraded the grabber mechanism. Moving away from the simple worm-driven rotary design, we introduced a 4-bar linkage system, still worm-driven, but with a longer stroke parallel motion to improve the reach of the gripper and deliver a constant grip area at every given opening.