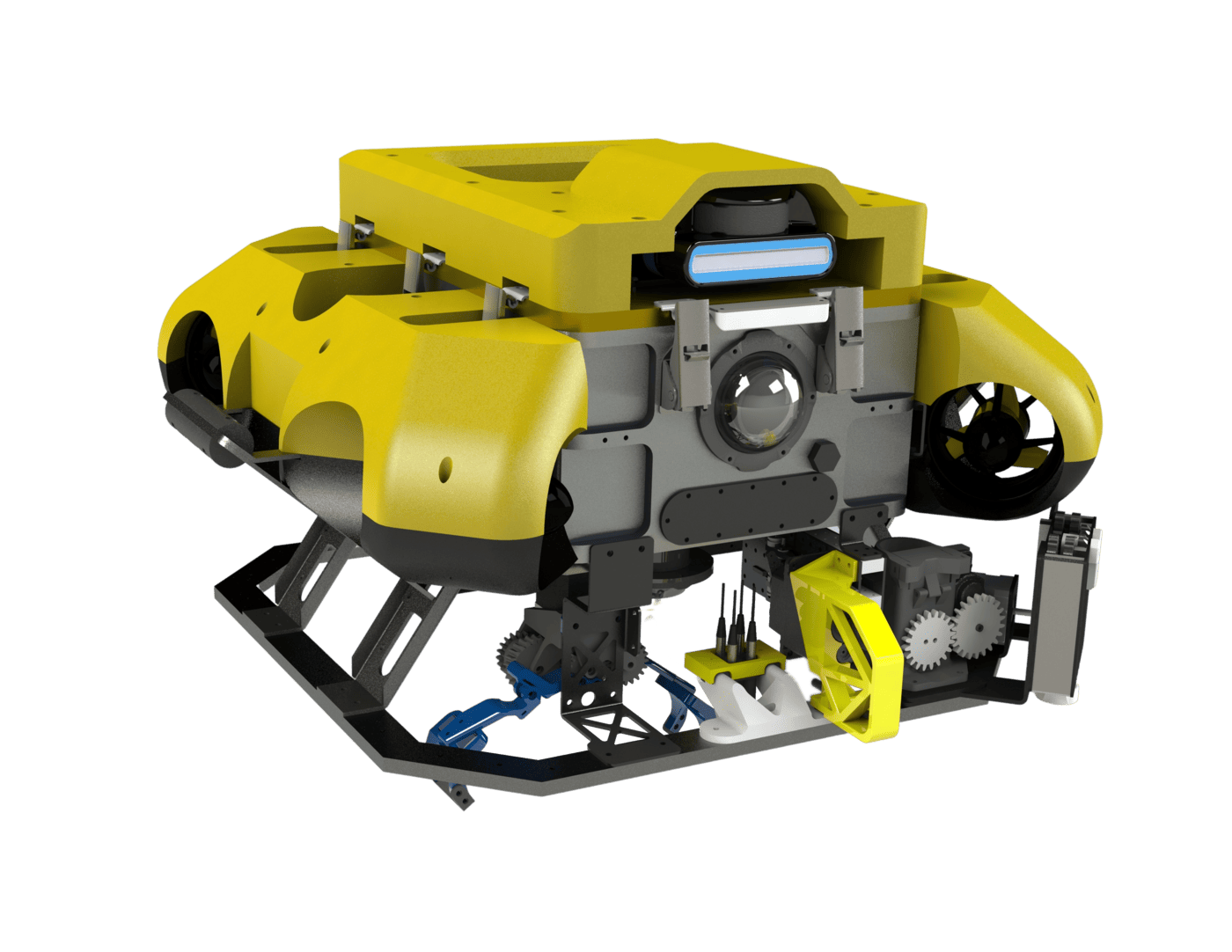
This year, Bumblebee has improved the AUV 4.0 to make it more damage resistant and hydrodynamic while also making space for improved actuation modules. This has culminated in the AUV 4.1 which boasts a new hydrodynamic shell, octagonal mounting frame, and fully electronically actuated ball dropper, torpedo launcher and dual grabber modules, all while retaining the capabilities of the 3rd generation AUV 3.99.
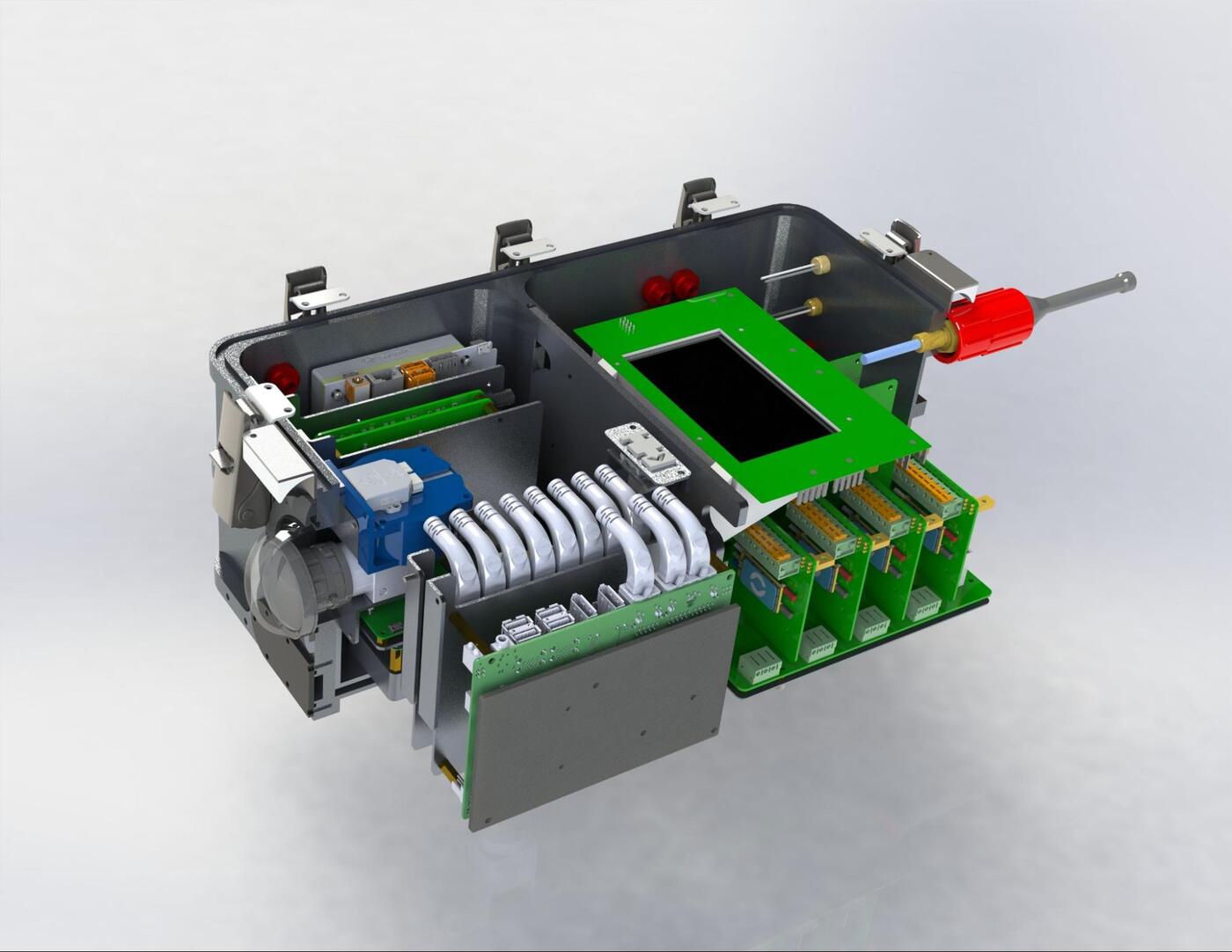
Main Hull
Our hull is fabricated by Computer Numerical Control (CNC) machining of aluminium. This design eschews the conventional circular hulls of our previous vehicles, instead opting for a rectangular shape to increase the packing efficiency of the rectangular PCBs in the main hull.
The hull isolates signal and data processing electronics from electrical noise generated by the power handling components by separating it into two compartments. The removable aluminium separator also serves to provide structural support for the hull to maintain its depth rating of 30m.
With our slot mounting mechanism of electrical components, we are also able to get much easier access to each component in the hull for simpler troubleshooting. The hull window is also outfitted with LED indicators, allowing us to easily do visual status checks during testing and deployment.
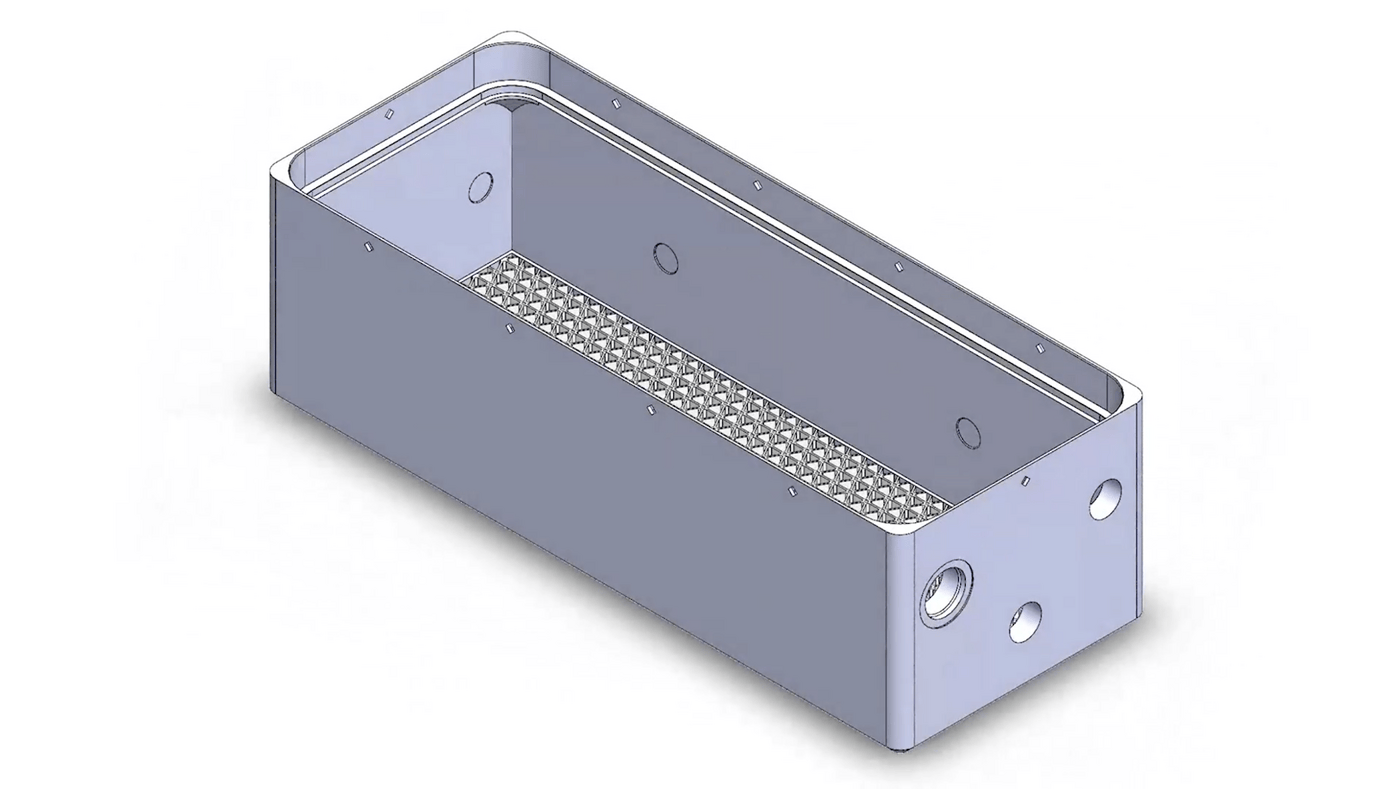
Battery Hulls
For our battery hulls, we were fortunate to be sponsored by SLM Solutions. Using their additive manufacturing method, we were able to utilise internal lattices and isogrid patterns for the walls and base of the battery hull. These internal structures increased the rigidity to weight ratio of the hull, resulting in a significant reduction in both the weight and volume of our battery hulls.
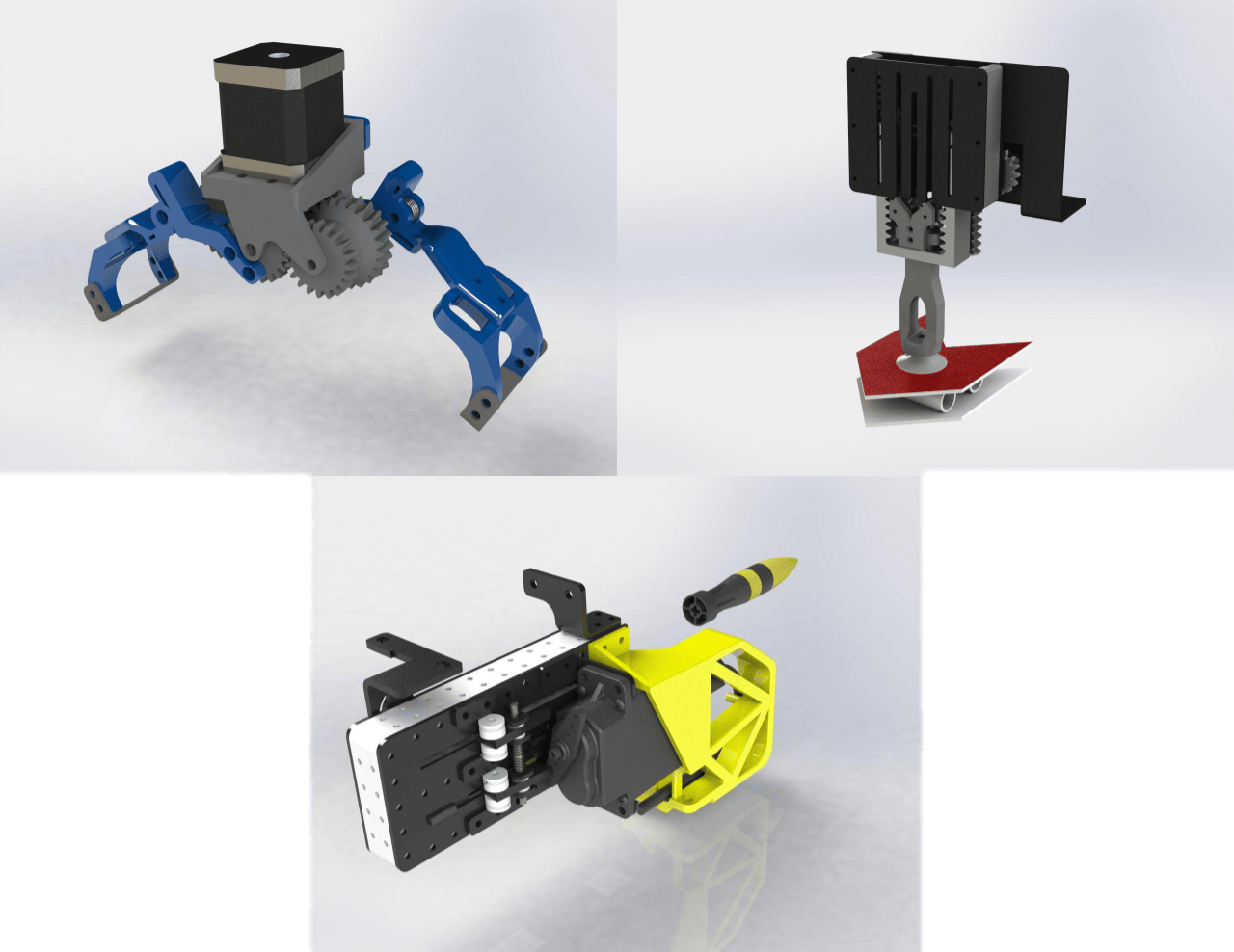
Actuation
The electronic actuation system of the AUV 4.1 has been upgraded to include a ball dropper, a torpedo launcher and two independent grippers. Bluetrail underwater servos were used to activate the torpedo launcher and ball dropper, greatly increasing their depth rating and reliability compared to previous custom waterproofed servos.
Our stepper-driven gripper uses torsion springs to make compliant claws that are capped with a layer of rubber for extra grip, making it ideal for grabbing prismatic profiles. To handle large flat objects that can prove challenging for the claw, we also developed our own hydraulic vacuum gripper which uses a peristaltic pump to create a local vacuum inside a suction cup, resulting in a firm grip. This dual gripper setup allows us to manipulate a much wider range of objects than would be achievable with only one of the two.
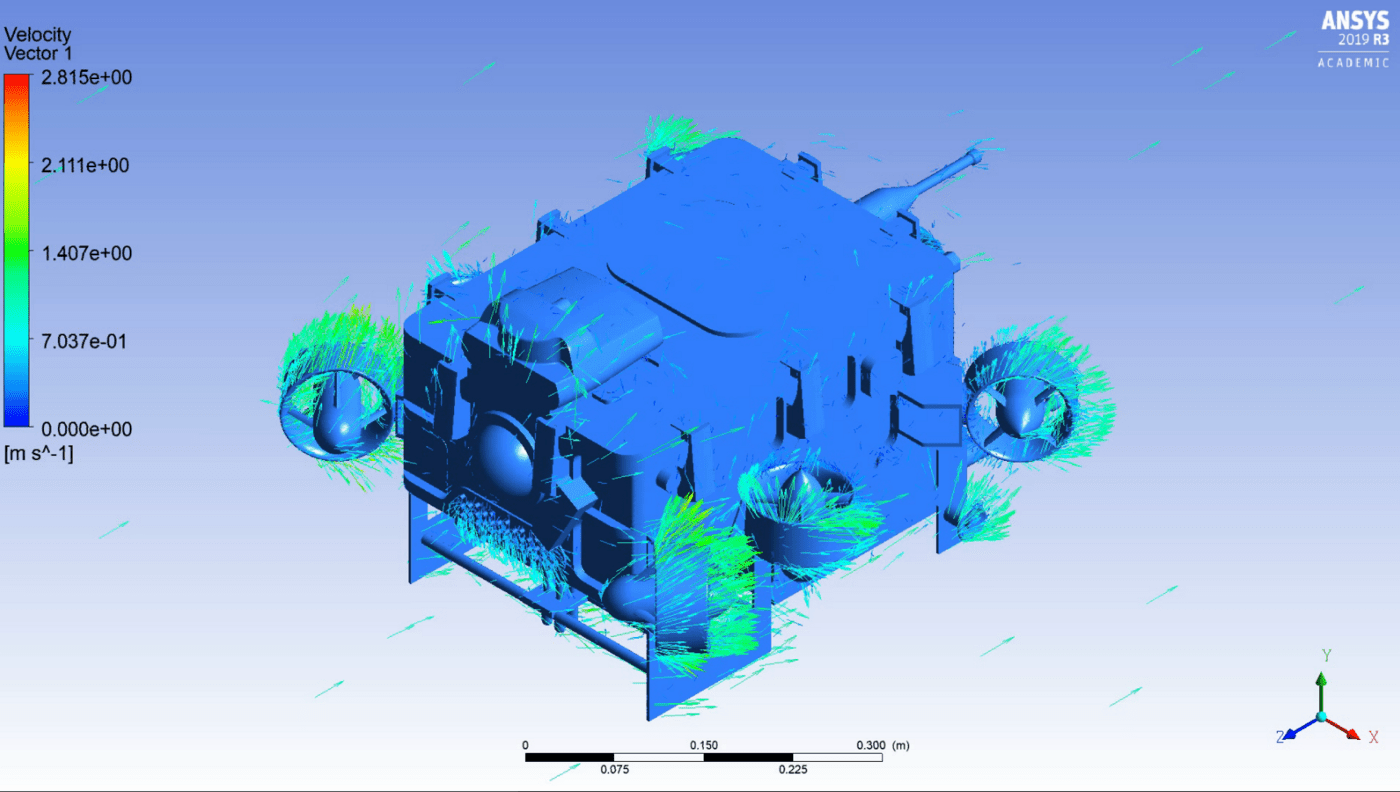
Computational Fluid Dynamics (CFD)
Making use of Ansys Fluent to perform fluid simulations, we were able to obtain the hydrodynamic properties of our vehicle in each degree of freedom. With the information obtained from the CFD analysis, we were able to create more accurate software simulations, enabling us to test our software without access to the physical vehicle in the pool.