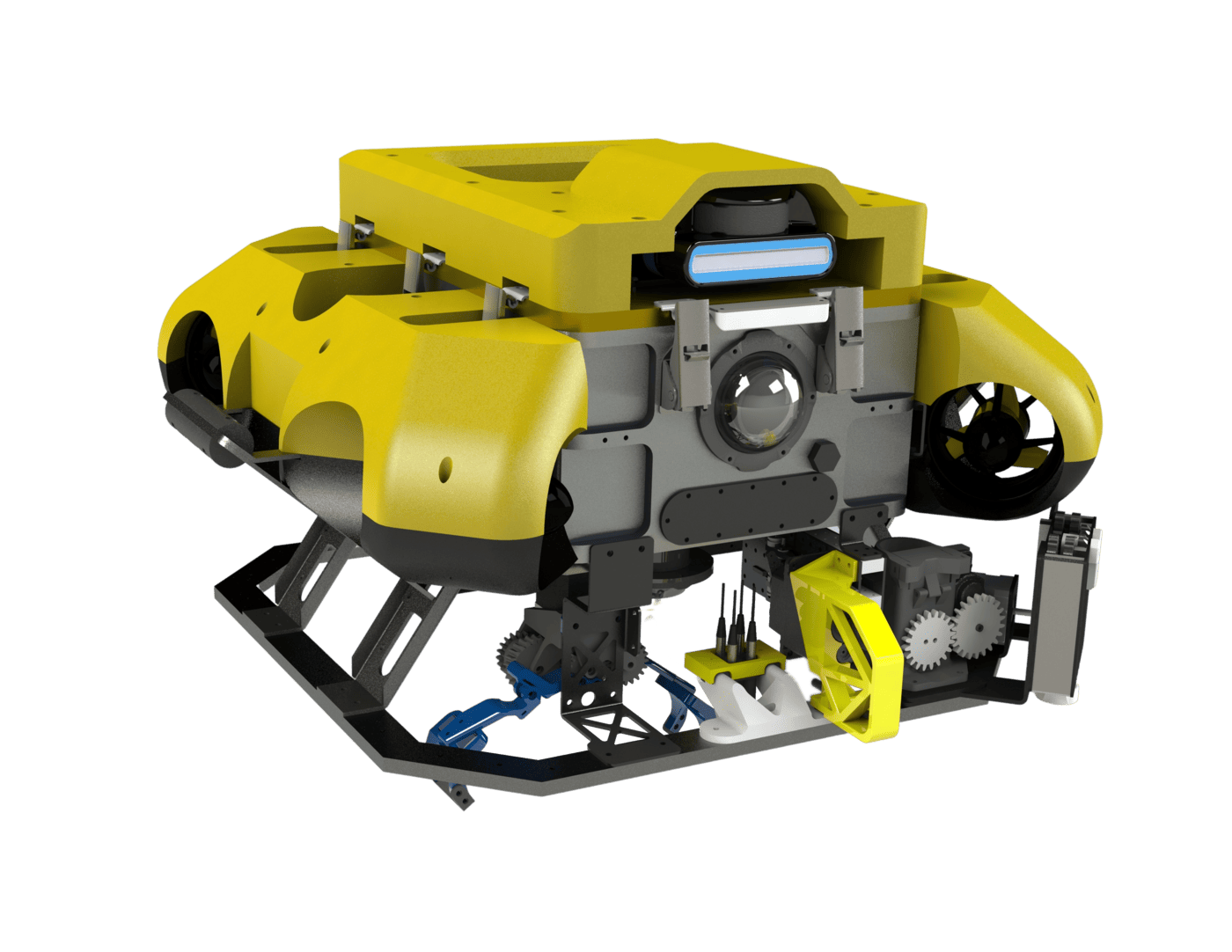
Bumblebee AUV 4.1
- Vehicle’s Dimensions
- Length: 0.6 m
- Breadth: 0.63 m
- Width: 0.38 m
- Mass of Vehicle
- 35 kg in Air
- Degrees of Freedom
- 6 (Surge, Sway, Heave, Roll, Pitch, Yaw)
- Single Board Computer Model
- Intel Core i7-1185GRE
- 32GB DDR5 RAM
- 512GB M.2SATA3 SSD
- NVIDIA Jetson AGX Orin
- Embedded Systems (Acoustics)
- Raspberry Pi 3B+
- Custom-designed Digital Acquisition Board
- Custon-designed Signal Conditioning Board
- Propulsion System
- BlueRobotics T200 Thrusters (x7)
- Navigation Components
- Teledyne RDI Pathfinder DVL
- VectorNav VN-100
- BlueRobotics Pressure/Depth Sensor
- Fizoptika VG103S-2LND FOG
- Vision Equipment
- FLIR BFS-PGE-31S4C-C Camera (Forward Facing)
- FLIR BFS-PGE-31S4C-C Camera (Downwards Facing)
- Sonar
- BlueView Subsea M750d Dual-Frequency Multibeam Sonar
- Manipulators
- Torpedo Launcher (Bluetrail SER-1X07)
- Ball Dropper (Bluetrail SER-1X07)
- Custom-designed Compliant Claw
- Custom-designed Hydraulic Suction Cup Gripper
- Power System
- 14.8V 15000mAh LiPo Battery (x2)
- Custom-designed Power Monitoring Board
- Underwater Connectors
- Subconn Micro and Low Profile Series
- Blue Robotics Penetrators
- Bluetrail Cobalt Series
- Software Architecture
- Robot Operating System (ROS)
- Ubuntu 20.04 LTS