Upgrades made for the BumbleBee 3.5, retains the core design principles of the Bumblebee 3.0 mechanical system. These upgrades include a new frame, reduced number of housings, more powerful thrusters for sea deployability up to sea state 3, and an all new grabber designed to tackles the new challenges in RoboSub 2018.
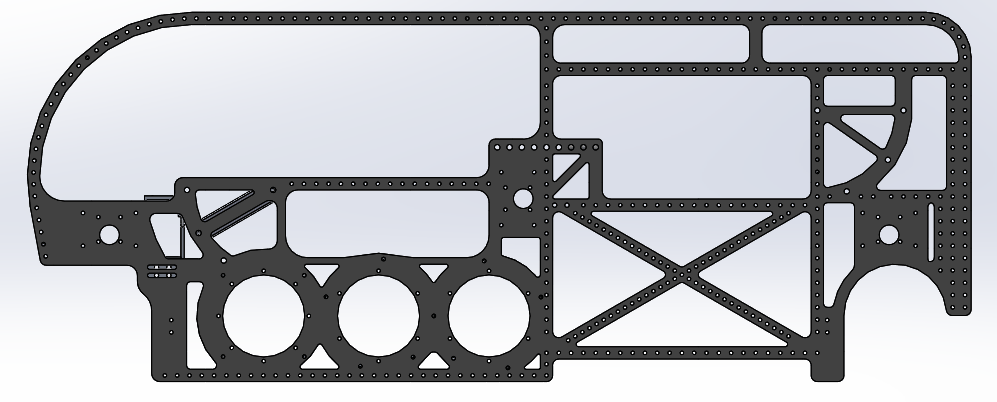
Frame
Acetal Co-Polymer was selected as the material for the frame as part the weight reduction effort for Bumblebee 3.5. Despite its lower specific density, it is able to provide sufficient strength as verified through Finite Elements Analysis conducted. Furthermore, there have been an increase in usage of plastics as the frame material in industrial ROVs due to its anti-corrosion properties.
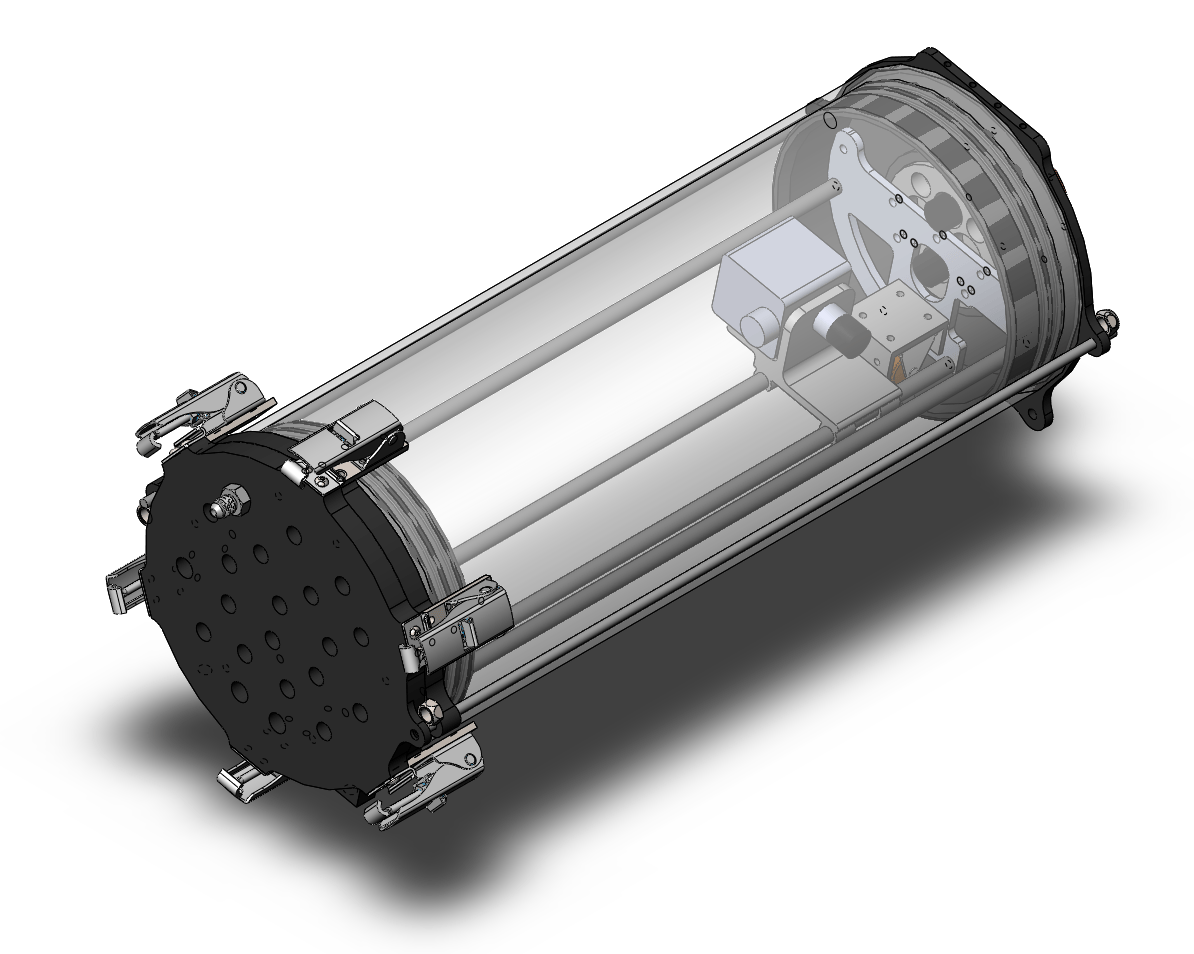
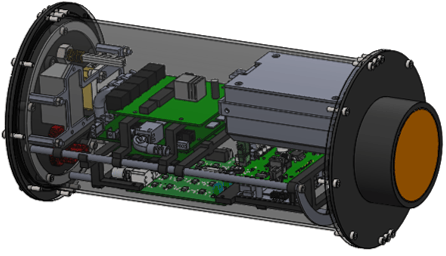
Main Hull
For this iteration, the main hull retains key features from the previous version, with minor changes such as length reduction of the hull and size reduction of the cooling fins.
The main hull is made of a standard size acrylic tube featuring end caps that are fabricated by CNC (Computer Numerical Control) machining of aluminum. Sealing is achieved by using 6 Southco draw latches to compress an O-ring between the end caps. The draw latches allow for rapid disassembly of the hull.
A hydraulic fitting on the hull allows it to be pressurized and monitored for water leakage in the form of a drop in internal pressure. Extensive pressure testing of the hull has been done at Seatronics pressure testing facility to ensure that the hull’s depth ratings are to standards.
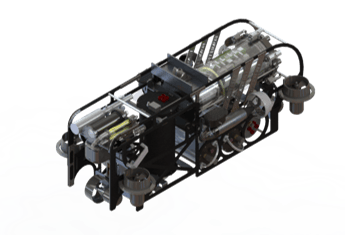
Working with the electrical team, all the internal components are carefully fitted using SolidWorks and SolidWorks Electrical. This optimises space in the main hull while ensuring there are not mechanical interferences.
DVL, Navigation, Acoustics (DNA)
Further weight reduction was achieved by ingeniously integrating 3 hulls: Doppler Velocity Logger Hull, Navigation Hull and Acoustics Hull into 1 new compact DNA hull.
Manipulators
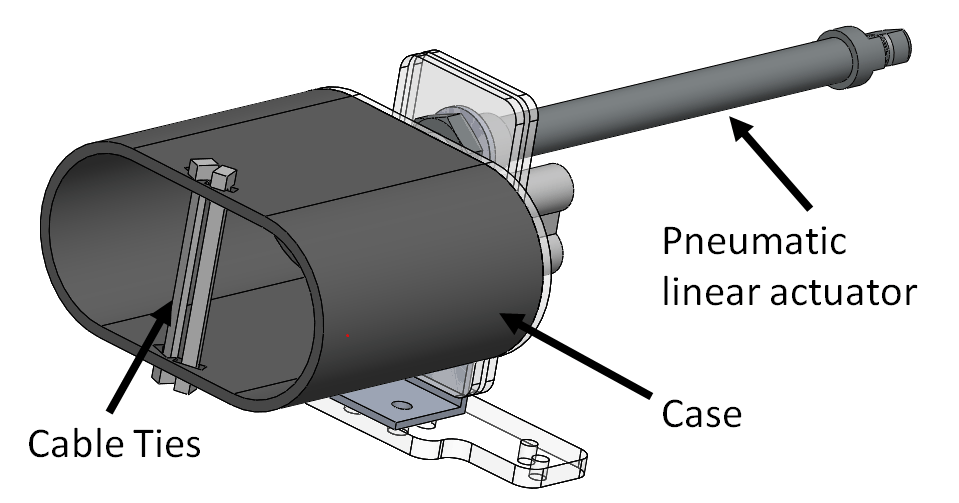
Our all-new grabber arm is a small and lightweight manipulator which only requires movement along a single axis to collect and eject the balls.
When deployed via a pneumatics-powered linear actuator, the grabber will be pressed down against the balls, causing them to slip behind the cable ties and be trapped within the case. They can then be ejected by retracting the grabber.
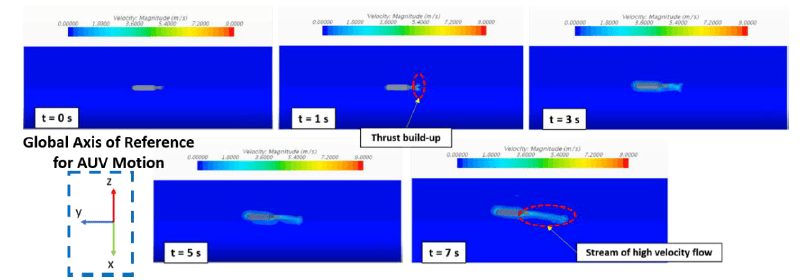
Computational Hydrodynamics
We explored the use of computational method to model the motion of an AUV that is acted upon by the force generated by its propulsion system and the surrounding fluid. This is done using CFD simulation that is coupled with free body dynamics available in StarCCM+ and with the use of overset meshing technique. The objective of this initiative is to use this method as a design tool to predict the behaviour of the AUV based on its physical design features when operating in a preset environment. On top of that, being able to track the AUV’s motion parameters, this method can also be further utilized as a preliminary testing platform for the AUV’s control system design. While yet to be applied onto a complex AUV geometry, the method/concept has been proven to be working on a simple ellipsoid AUV geometry.
This method will come into play when designing new generations of AUVs.