This year, our electrical architecture was updated and revamped to cater to our hardware upgrades and to improve on reliability.
One new feature is the integration of a Quad-FTDI circuitry on the backplane, which allows us to reprogram the firmware of multiple daughter boards using a single USB cable. This improvement enables us to easily swap out faulty daughter boards, while allowing the on-the-fly reprogramming, hence increasing the reliability and usability of our system.
Ethernet and Controller Area Network (CAN) are our primary methods of communication for high and low-level components respectively, allowing for ease of adding new peripherals.
Navigation System
The navigation system on board of Bumblebee 3.5 uses 2 Inertia Measurement Units (IMU), a Doppler Velocity Log (DVL) and a depth sensor.
The IMUs provide critical inertial data at a rapid rate of 100 Hz. The IMU’s proprietary algorithms ensure the output of correct data despite the presence of electromagnetic interference generated by the BumbleBee’s suite of electronics and thrusters.
The DVL is an active sonar system that helps to track the velocity of the instrument via a four-beam solution directed at 30 degrees nominal from the sensor’s ceramic head. The velocity readings obtained are combined with tilt and altitude measurements, then resolved into the three orthogonal x, y and z-axes via a least squares fit solution. These resolved readings are further filtered through a direct three-degree of freedom Kalman filter, which serves to attenuate noise. The calculations outputs a more accurate positional coordinate of the vehicle.


Computer System
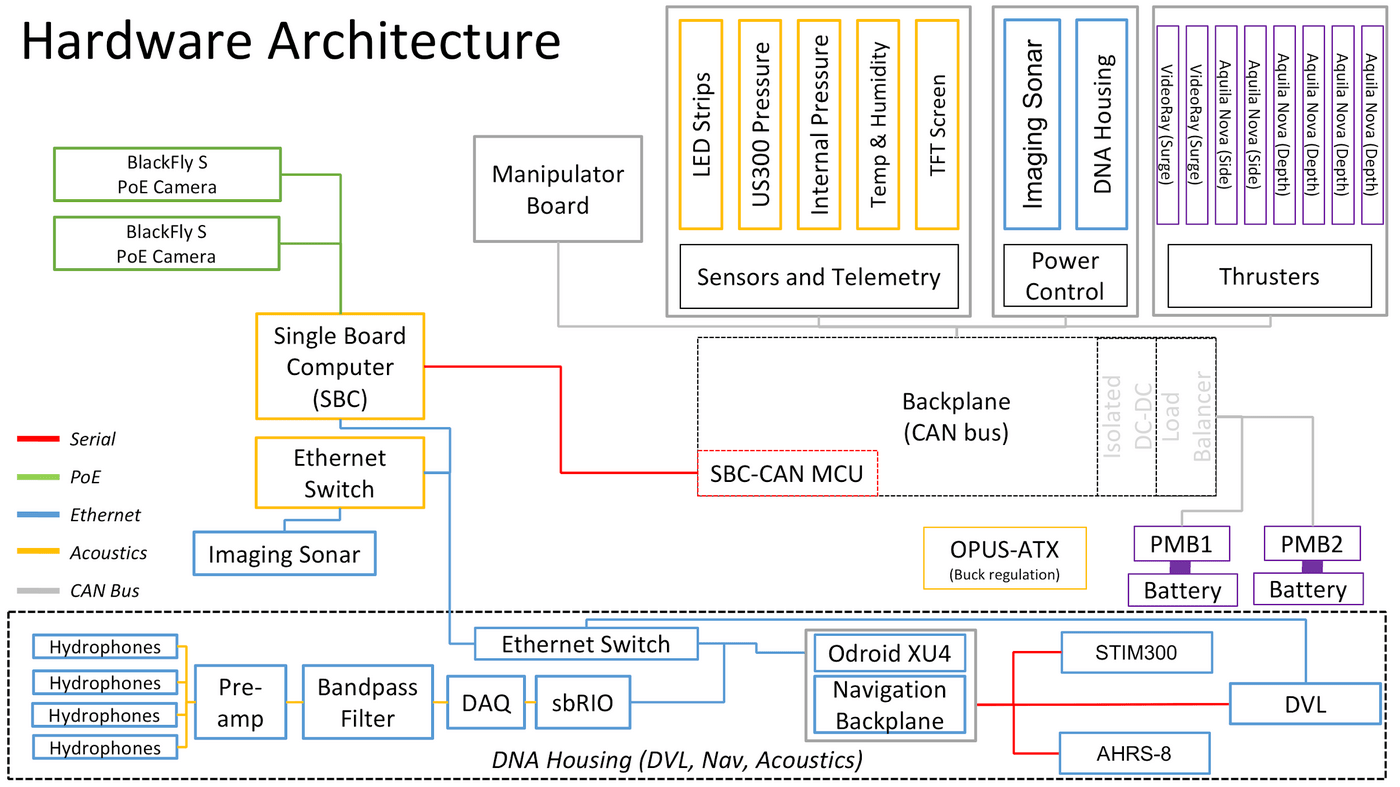
BumbleBee’s computer system is powered by an upgraded Intel Core i7-7600 quad core processor on an Aaeon GENE-KBU6 Single Board Computer (SBC), along with a 512 GB mSATA Mini SSD (Solid State Drive). The unreliable USB-FTDI circuitry was swapped with RS232 for the SBC to transmit and receive data with the CAN bus.
A Power over Ethernet (PoE) expansion daughter board is added to the SBC for dedicated lines for our 2 new Blackfly S PoE Cameras. This eliminated the bulky Firewire interface cards, reduced the susceptibility of the camera feeds to interference and featured more reliable auto-exposure and better image reproduction.
The computer is connected to dockside Operator Control Station (OCS) through a 100 Mbps Ethernet tether. The vehicle is networked to a Gigabit switch that connects to the navigation suite and the OCS.
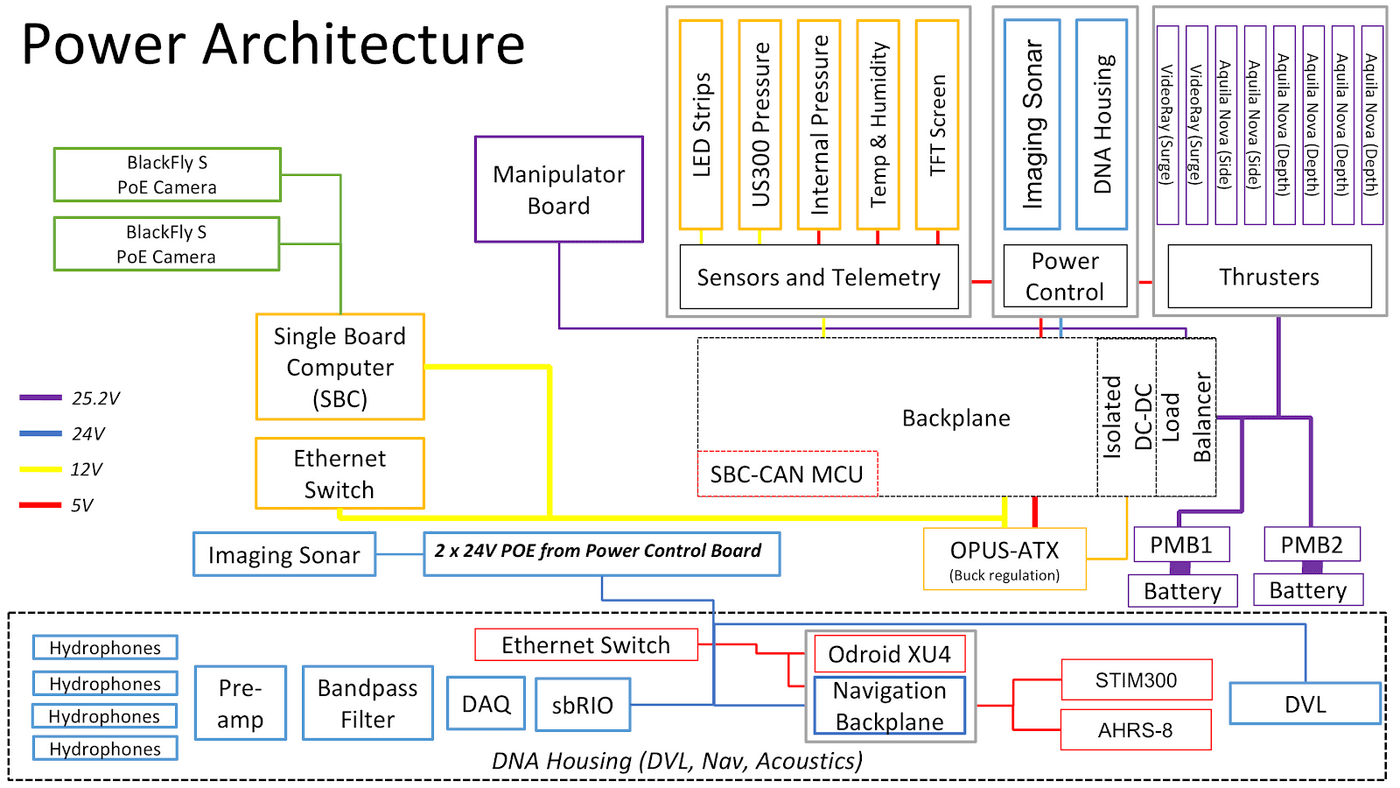
Power Management
The vehicle is powered by two 10000 mAh lithium polymer (LiPo) batteries in parallel, providing approximately two and a half hours of operational time before requiring a recharge. Each LiPo battery is installed into a battery pod with the Subconn connectors which allows for both charging and discharging without having to remove the physical battery. The load balancer circuit on the Backplane enables hot swap capability, making the swapping process a smooth one without having to power down the system. Within the pods, the batteries are connected to custom a Power Monitoring Board (PMB) which monitors vital status such as current draw, cell voltage and capacity. The PMB has been upgraded to include a more accurate and space saving current monitoring IC and a PMOS with a higher current rating and larger footprint to improve heat dissipation.
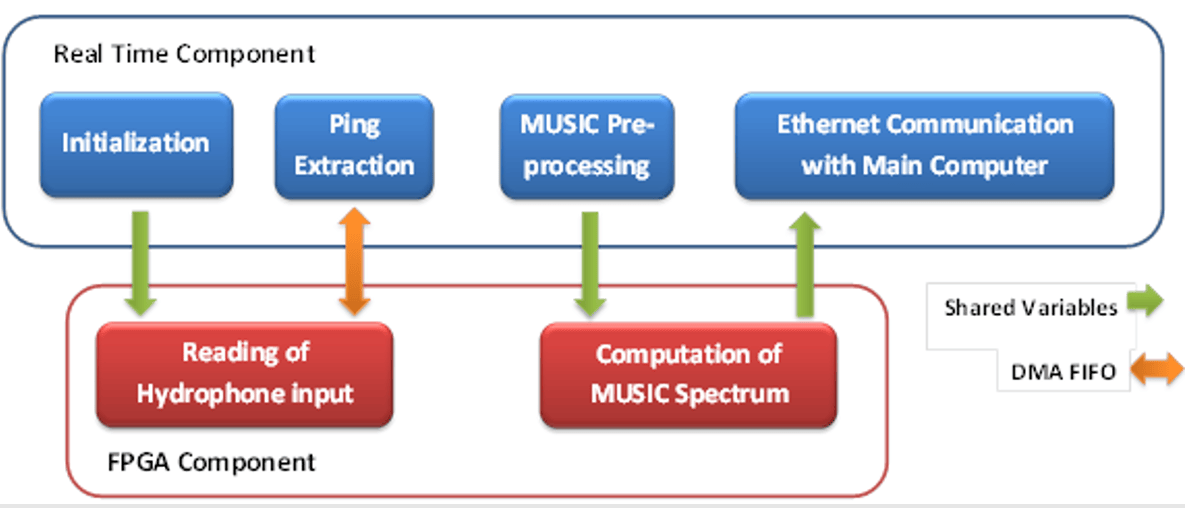
Acoustics
BumbleBee’s acoustic sub-system has four Teledyne hydrophones in a square array, integrated with custom fabricated analog and digital boards. The high-resolution MUSIC (MUltiple SIgnal Classification) algorithm is used for localising the acoustic pinger.
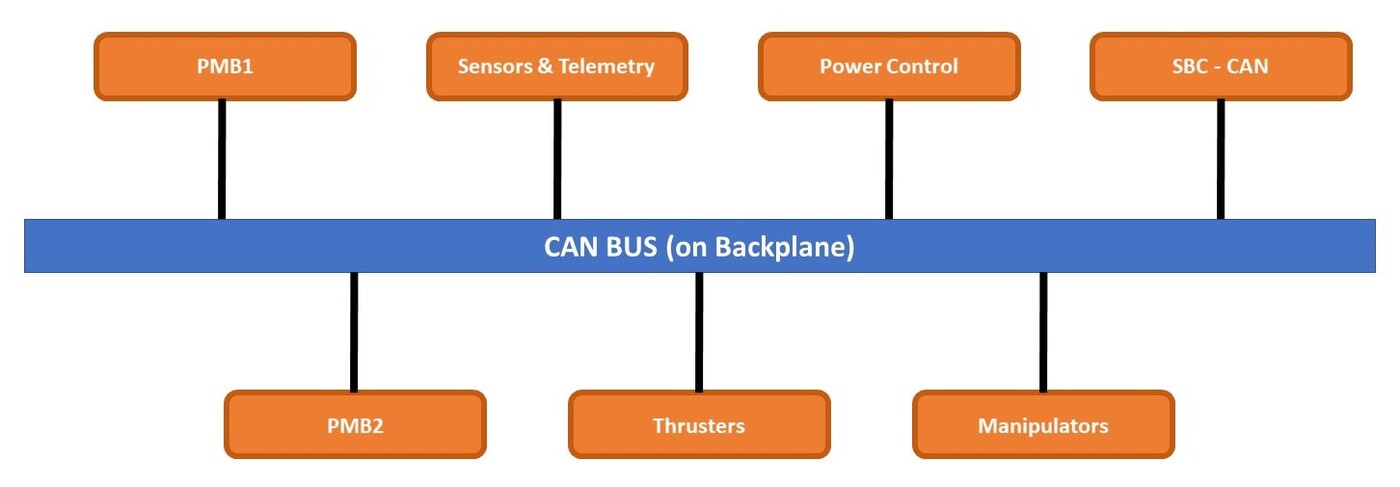
Controller Area Network (CAN)
The CAN protocol is implemented for communication between various devices in the AUV. It is deployed on all the daughter boards, the PMBs and the SBC. The deployment of CAN eliminates single point of failure from our systems by not requiring the SBC to be in the center of the communication loop. With CAN, hardware devices are able to exchange data in a peer to peer fashion over a robust differential CAN bus without additional wiring overheads between devices.