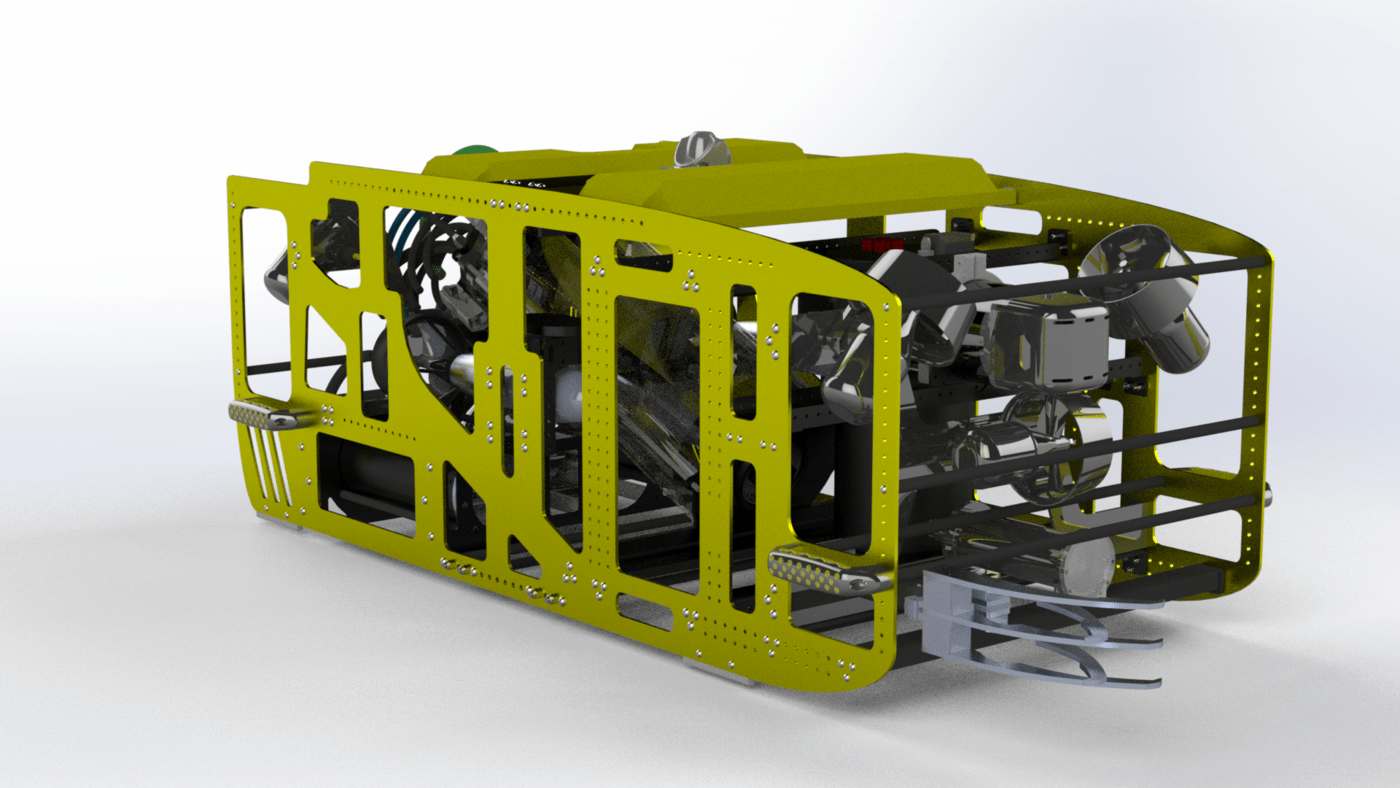
Bumblebee AUV 3.5
- Vehicle’s Dimensions
- Length: 1.3 m
- Breadth: 0.6 m
- Width: 0.6 m
- Mass of Vehicle
- 52 kg in Air
- Degrees of Freedom
- 6 (Surge, Sway, Heave, Roll, Pitch, Yaw)
- Single Board Computer Model
- Intel Core i7-7600
- 16GB DDR4 RAM
- 512GB mSATA3 Mini SSD
- Embedded Systems (Acoustics)
- sbRIO-9606 400MHz controller with NI9223 Analog input module
- Propulsion System
- Rovee Brushless Thrusters (x6)
- Videoray Surge Thrusters (x2)
- Navigation Components
- Teledyne RDI Pathfinder DVL
- Sparton AHRS-8 IMU
- MS US300 Pressure/Depth Sensor
- STIM 300 IMU
- Vision Equipment
- FLIR BFS-PGE-31S4C-C Camera (Foward Facing)
- FLIR BFS-PGE-31S4C-C Camera (Downwards Facing)
- Manipulators
- Blue Robotics Newton Subsea Gripper modified
- Festo Pneumatics Systems
- Power System
- 22.2V 12000mAh LiPo Battery (x2)
- Underwater Connectors
- SubConn Micro and Low Profile Series
- Software Architecture
- Robot Operating System (ROS)
- Ubuntu 16.04 LTS