The 2013-2014 vehicle, BumbleBee 2.0, features a complete redesign from the previous vehicle. This design improvement, inspired by industrial ROVs (Remote Operated Vehicles), has reduced the overall weight to 48 kg while allowing more sensors and actuators. At the same time, this increases robustness and modularity to aid disassembly during troubleshooting. The key features of the mechanical system are the frame, the hull, the manipulators and the external housings. Custom battery pods have been built to accommodate the newer and larger battery management system.
All aluminum components of the mechanical subsystem are fabricated from 6061-T6 aluminum. They are then hard anodized and sealed for maximum corrosion resistance, electrical insulation and scratch resistance. FEA (Finite Element Analysis) is employed for weight optimisation.
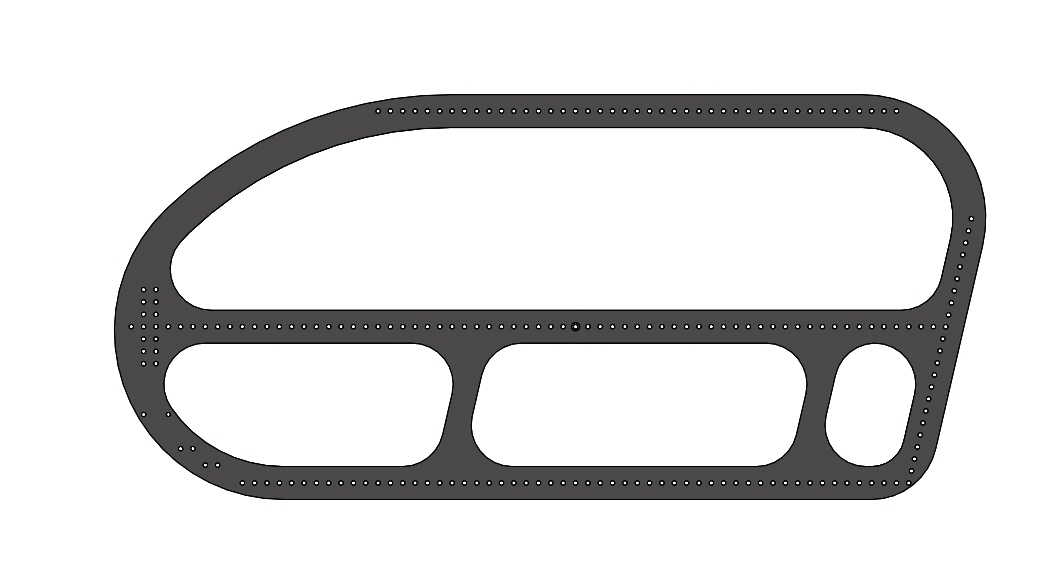
Frame
With the help from Cititech industrial engineering, the frame is made by laser cutting sheet aluminum and is bolted together with hardware from Bossard. The robust and rigid frame encompasses all components and protects them from impact. Its precisely determined drill pattern allows for easy adjustment of component positions.
Hull
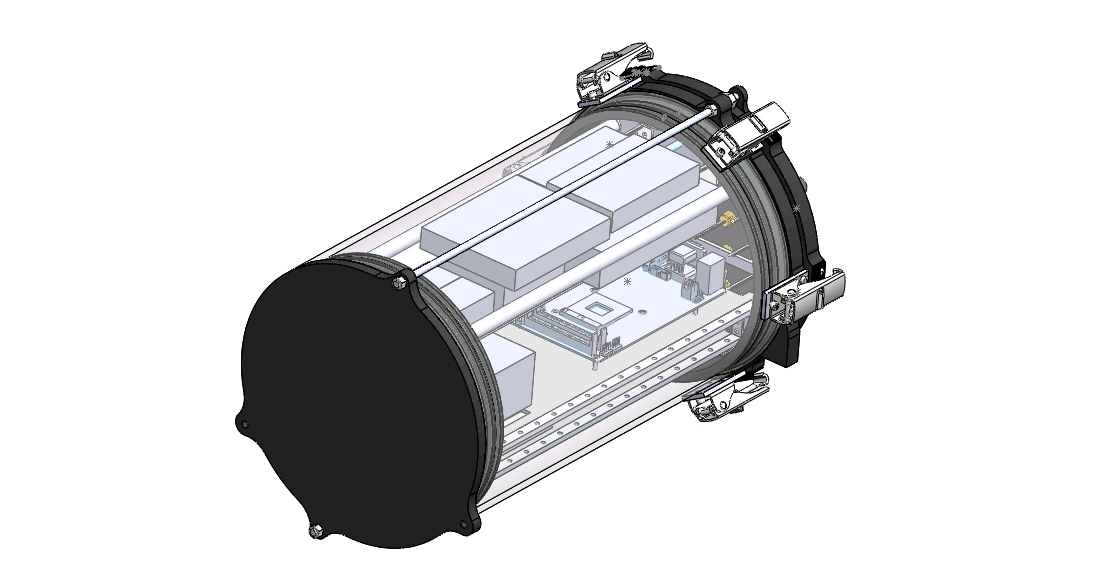
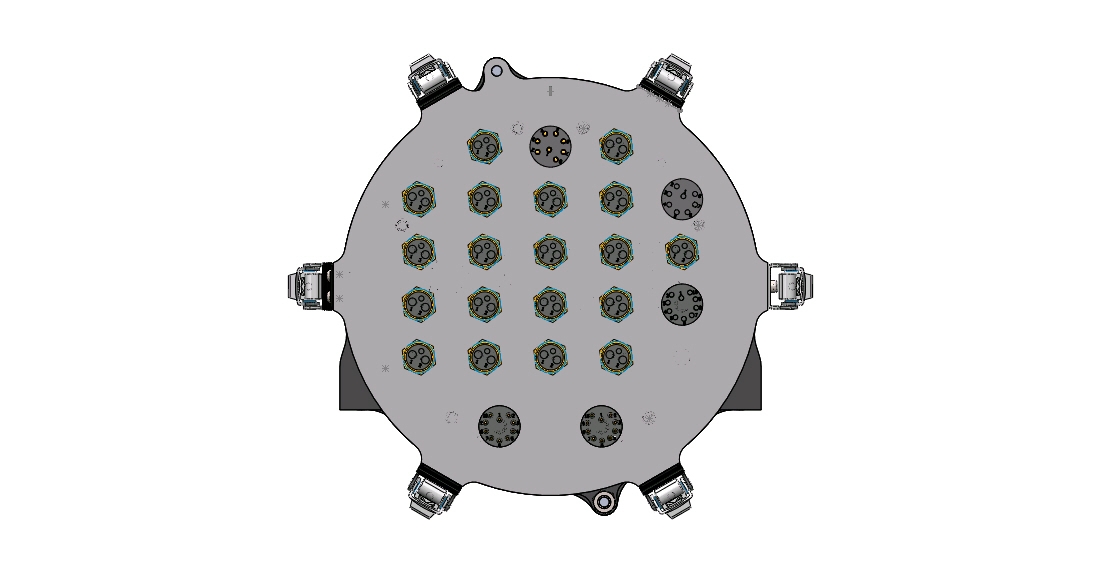
BumbleBee’s hull is made of a standard size acrylic tube featuring end caps that are fabricated by CNC (Computer Numerical Control) machining of aluminum. Sealing is achieved by using the six Southco draw latches to compress an O-ring between the end caps. The draw latches allow for rapid disassembly of the hull. This improvement over the previous bolted flange design eases access to the electronics within the hull, facilitating troubleshooting of components. The end caps are sealed to the acrylic tube via a radial seal.
A valve on the hull allows it to be pressurized and also monitors any drops in pressure. This feature allows the hull to be tested for any leaks before the vehicle is submerged in water. A pressure is maintained about 120 kPa during operations. Any pressure drop indicates a hull leak, which would activate the leak sensor. The leak alert is propagated to the BumbleBee Control Panel which displays a warning popup. Extensive pressure testing of the hull was conducted at Hallin Marine’s pressure testing facility and the hull is rated to a depth of 40 meters.
External Enclosures
Camera Housing
BumbleBee’s external enclosures house the electrical systems located outside the main hull. These comprises the DVL (Doppler Velocity Log) housing, camera housing, the hydrophones enclosure and the battery pods.
DVL Housing
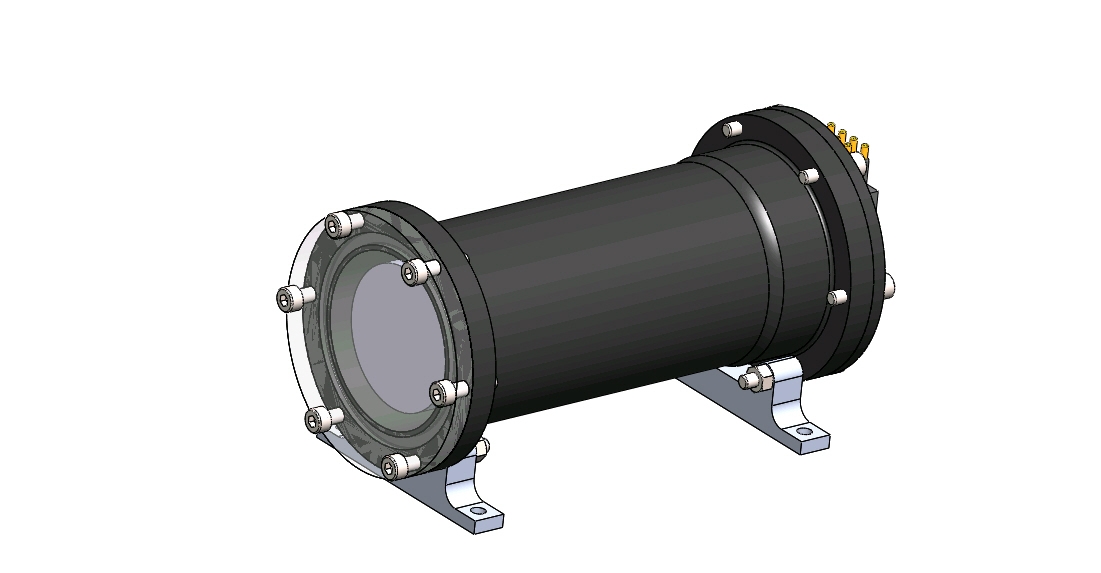
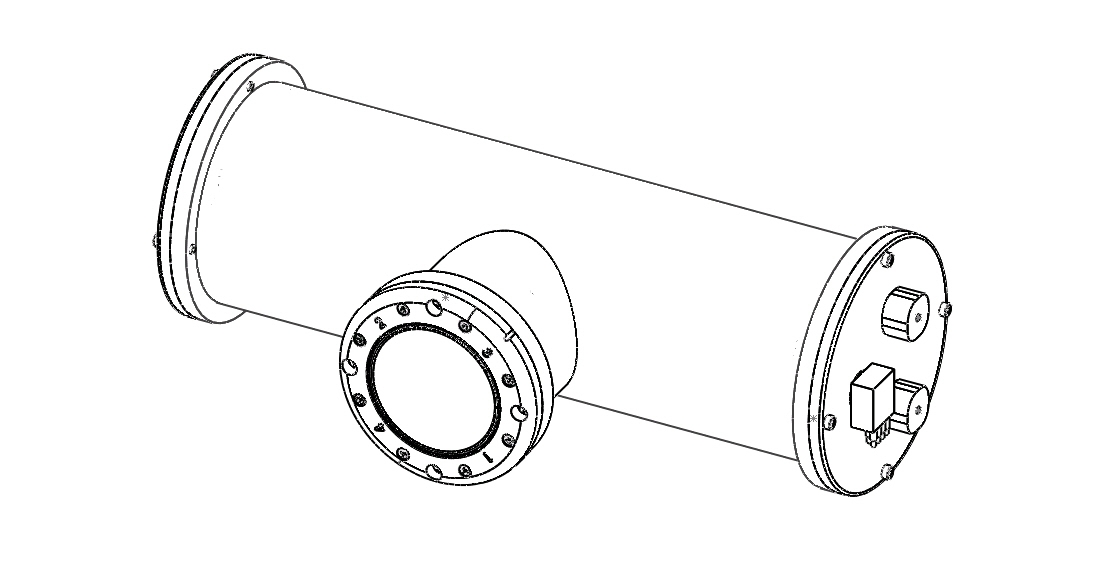
The DVL housing was fabricated by welding 6061 aluminum tubes into a T structure. The vertical tube houses the sensor head while the horizontal tube houses the electronic box. SubConn lower profile bulkheads are used to provide an electrical connection. The end caps are sealed against the tube with a double O-ring radial seal.
Battery Pods
The battery pods consist of acrylic tubes epoxied to off-the-shelf screw on/of end caps that are integrated with O-ring seals. The pods feature titanium pressure relief valves from DeepSea Power and Light. This safety feature prevents an explosion in the event of pressure build-up in the battery pod from overcharging of the LiPo battery housed in the pods. SubConn MCBH16F and MCBH8F underwater connectors are attached to the pods to serve as power lines and balancing leads for the LiPo batteries respectively.
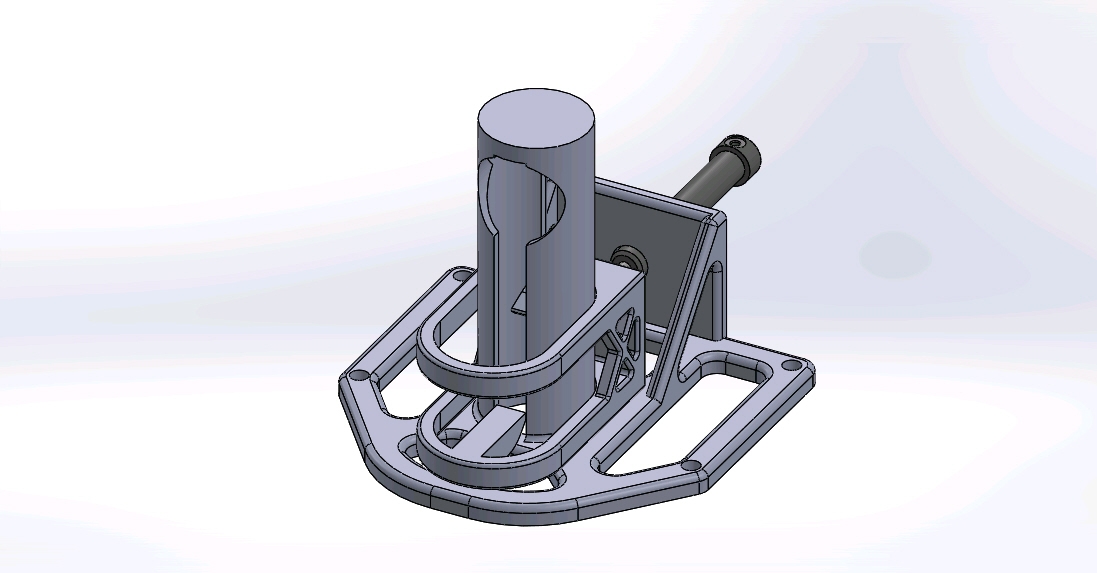
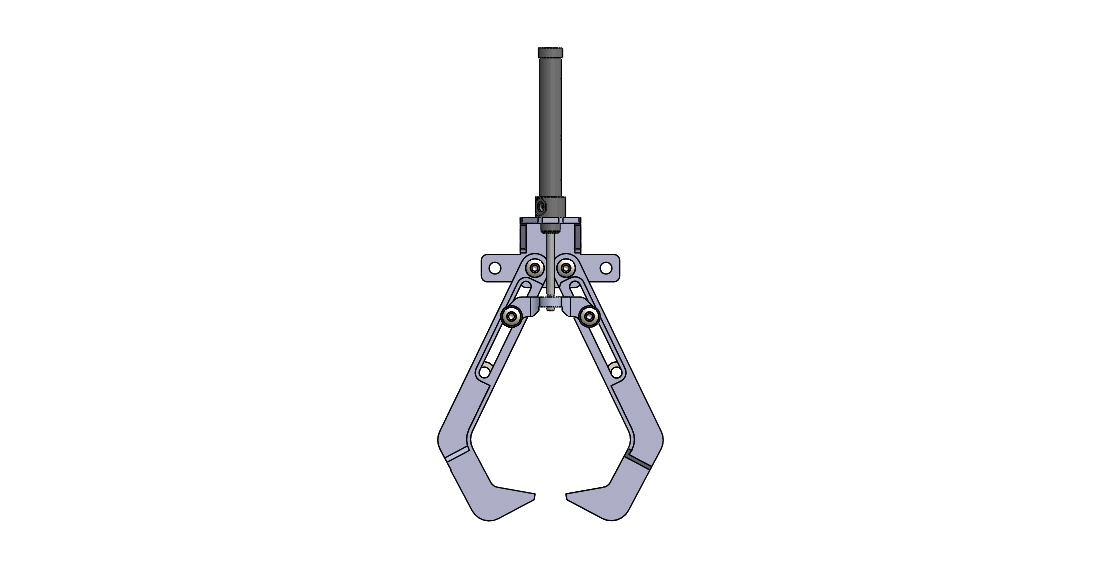
Manipulators
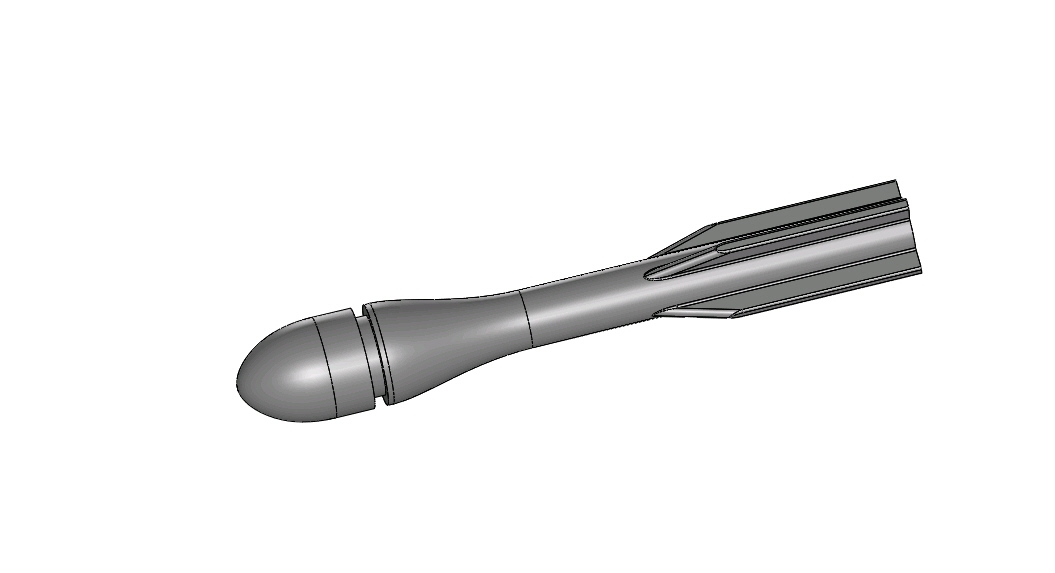
The vehicle’s manipulators comprises of a pair of grabbers, torpedo launchers and a marker dropping mechanism, all of which are fabricated by 3D printing. The grabber design has been modified from the previous year’s to be more compact for better integration into the vehicle.
The torpedo design incorporates an O-ring to create the pressure build-up necessary to launch the torpedo. A ball dropping mechanism is designed for the marker task. The mechanism can hold up to four balls at once and drop them individually. The manipulators are actuated by a Festo Singapore pneumatic system stored in a 13 cubic inch Ninja Paint ball tank.