The mechanical system of BBASV 4.0, which includes actuation, electronic mountings, and load bearing structures are designed with modularity and maintainability in mind to allow members to develop and iterate upon the subsystems concurrently. The layout of each subsystem is also carefully considered in the master plan to maximize accessibility so that members can make changes to the system safely and efficiently, thereby reducing BBASV 4.0’s downtime.
Compared to our previous iteration, the BBASV 4.0 adopts a more conservative approach in development, in which state-of-the-art actuated systems such as the actuated drone takeoff and landing platform are removed in favored of more robust solutions such as a static landing platform.
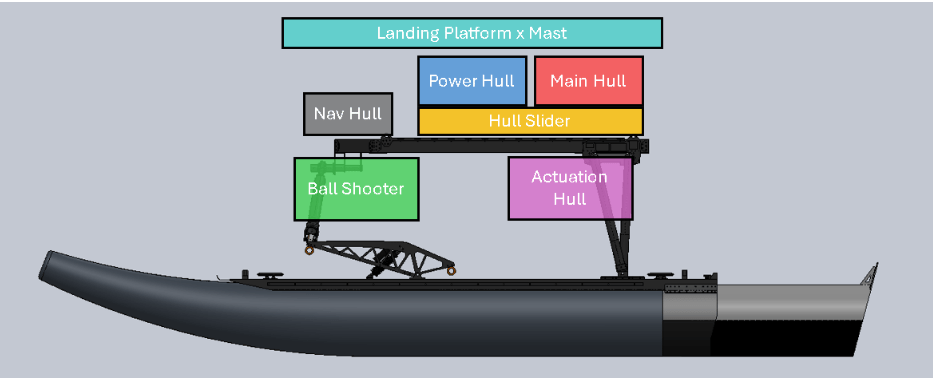
A Mast Reimagined
Our 2 m high mast acts as a frame for mounting our sensors and antennas. We have done away with the iconic tall mast of previous iterations, making way for a larger landing platform for the Jellyfish 2.0.
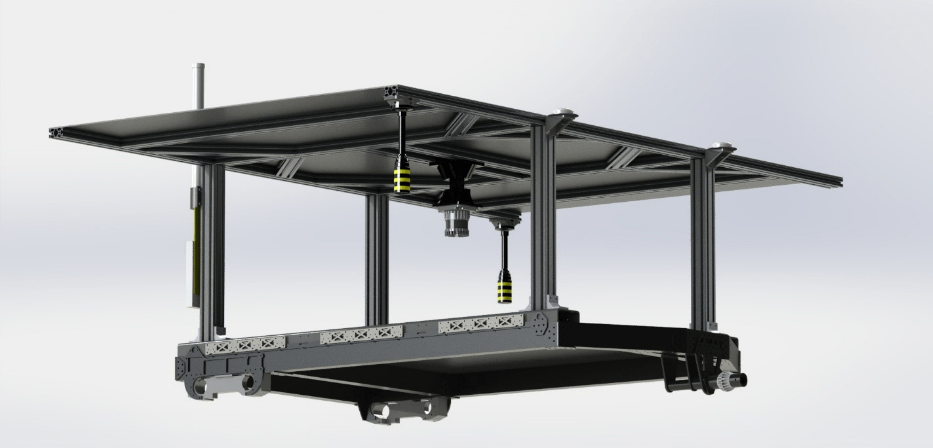
The focus of the mast itself shifts from having a compact mast that houses various sensors with accumulated weight to allowing a safe landing space for UAV while still maintaining antennas and sensors operational conditions. We have prioritized creating a safer landing space for the Jellyfish 2.0, opting for a much simpler helipad design. The platform is 2.5 m x 1.5 m wide and constructed from aluminium profile bars, with sensors and antennas mounted underneath and around the platform, providing an obstruction-free landing area for the UAV. A pair of aluminium racks mounted on each side of the payload tray provides secure fastening for the 4 pillars of the mast, as well as our hull slider and other sensors.

Lock and Loaded
To ease loading of our hulls onto the payload tray, we implemented a roller system with a sliding aluminium tray. This tray slides over a set of 16 rollers and supports up to 70 kg, allowing the hulls to be mounted or dismounted from both sides of the BBASV 4.0. The sliding tray can also be locked in the extended state, allowing team members to work on the hulls safely. When stowed, the tray is secured via an additional ball-lock pin, to prevent slippage during the vehicle’s movement.
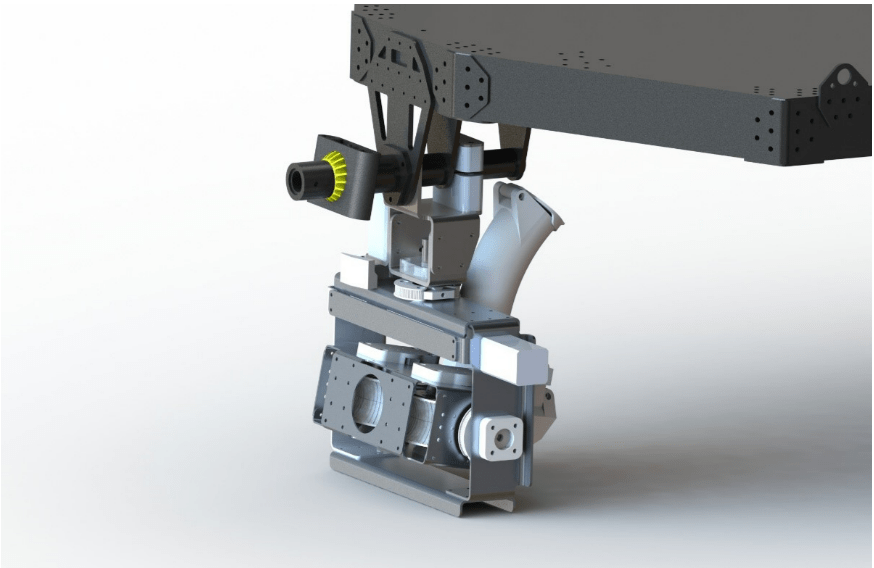
Fire in the Hole
The Ballshooter sees a return to a flywheel design from the last iteration in an attempt to squeeze out every drop of performance. Two textured flywheels are used to launch the balls, each weighing in at 0.7 kg and spinning at 3400 rpm, remedying the issues faced with loss of velocity when shooting wet balls.
The loader system stores 4 balls and pushes each ball into the flywheels for firing via a piston. A gate prevents movement of the remaining balls during firing and is mechanically linked to the piston via a cam mechanism.
The pan and tilt system allows 2 degrees of freedom for target tracking and stabilization against the waves. The motion systems are driven by 2 steppers motors with StallGuard technology to enable sensorless homing.