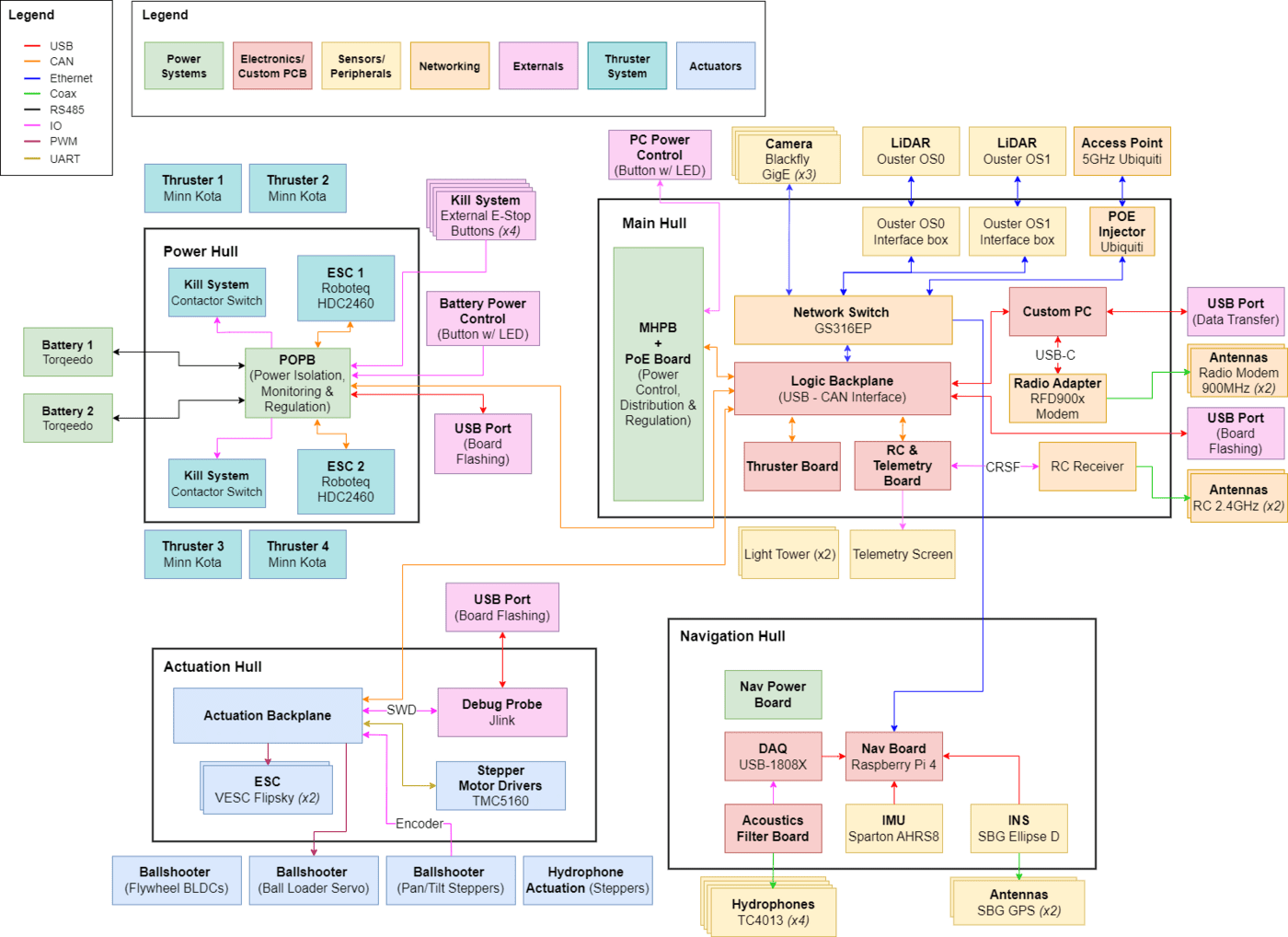
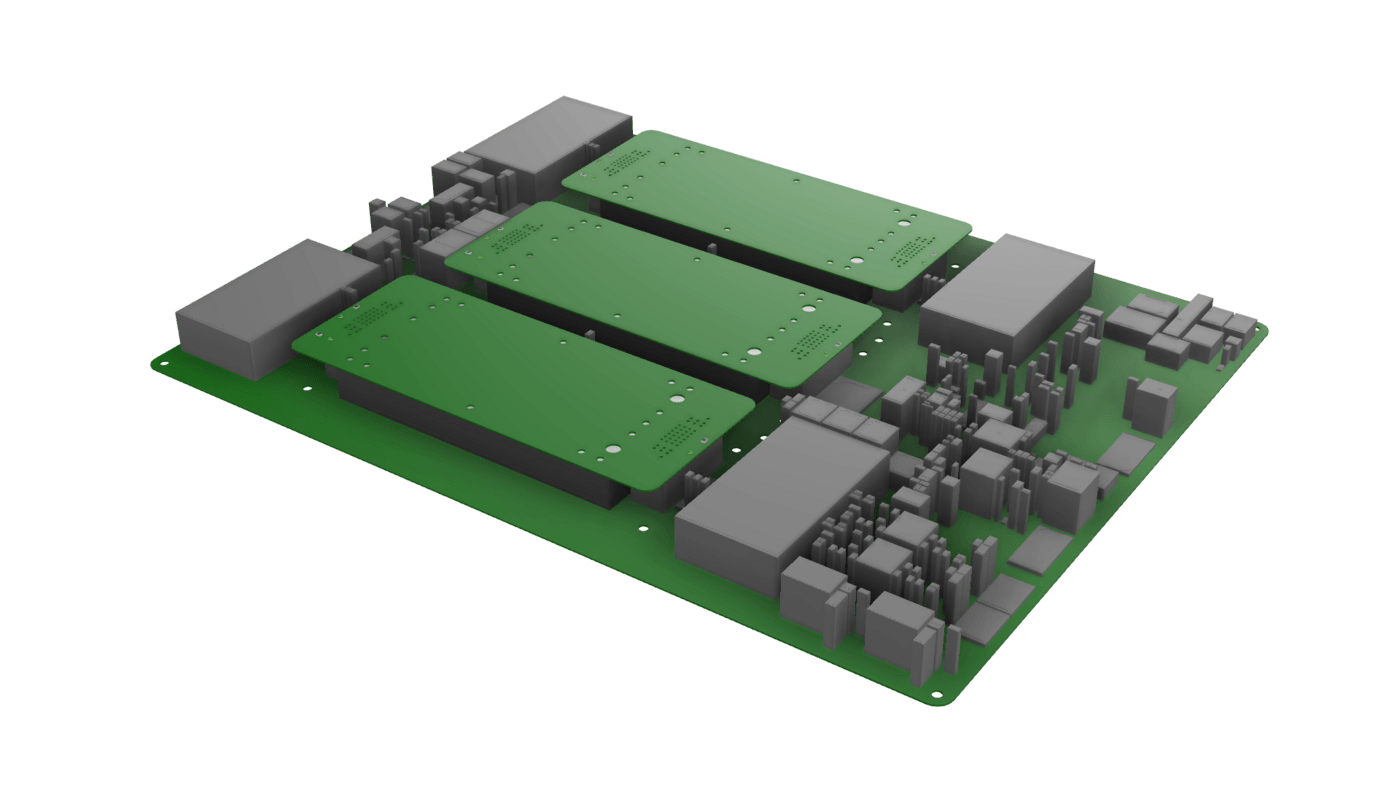
The electrical system of BBASV 4.0 is split across multiple hulls. Compared to our previous iteration, we further compartmentalized our electronics into more hulls for better modularity and ease of cable management.
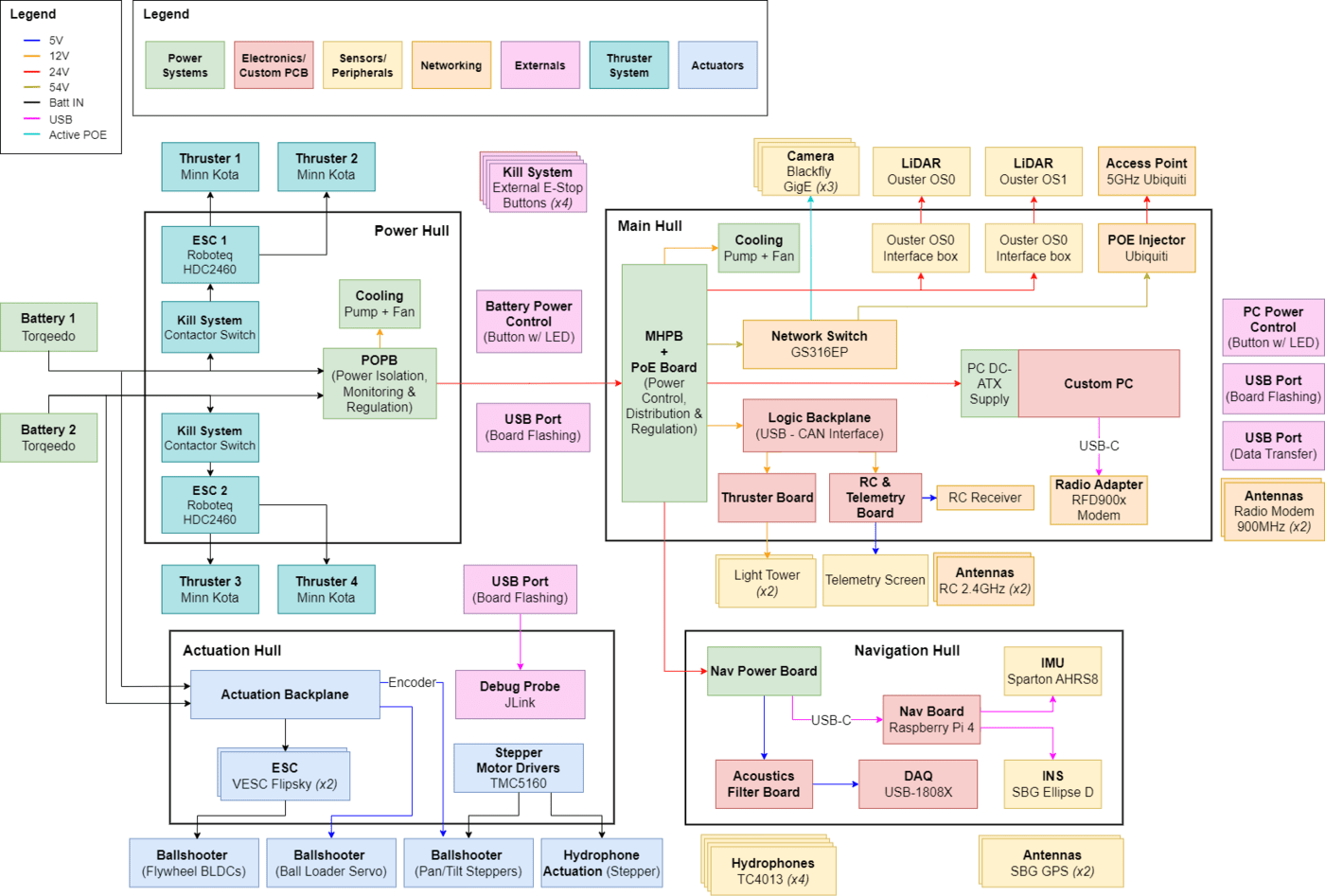
USB and Controller Area Network (CAN) are our primary methods of communication between the Custom PC and the overall electrical stack, while Ethernet and an Ubiquiti link are used to connect to external peripherals and our workstations.
Modularizing the System
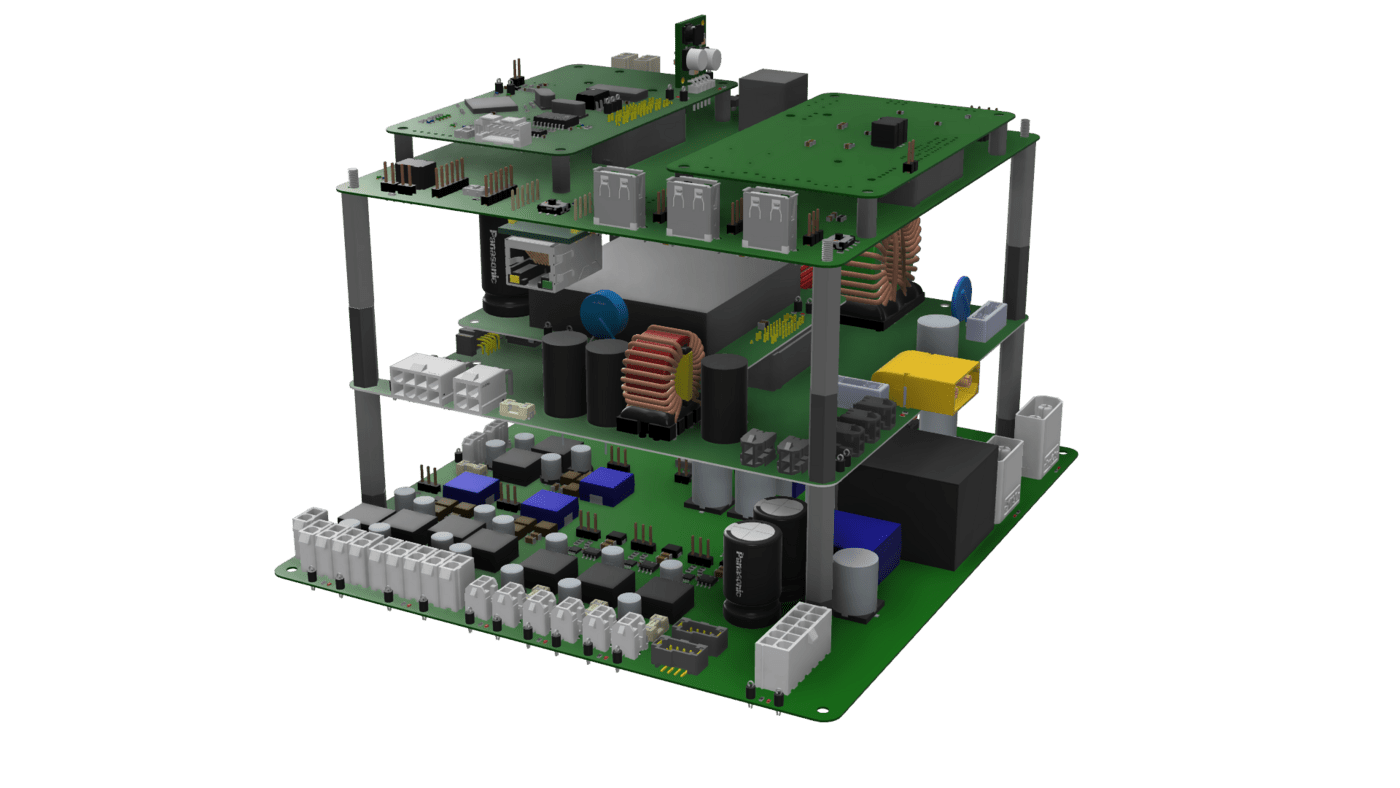
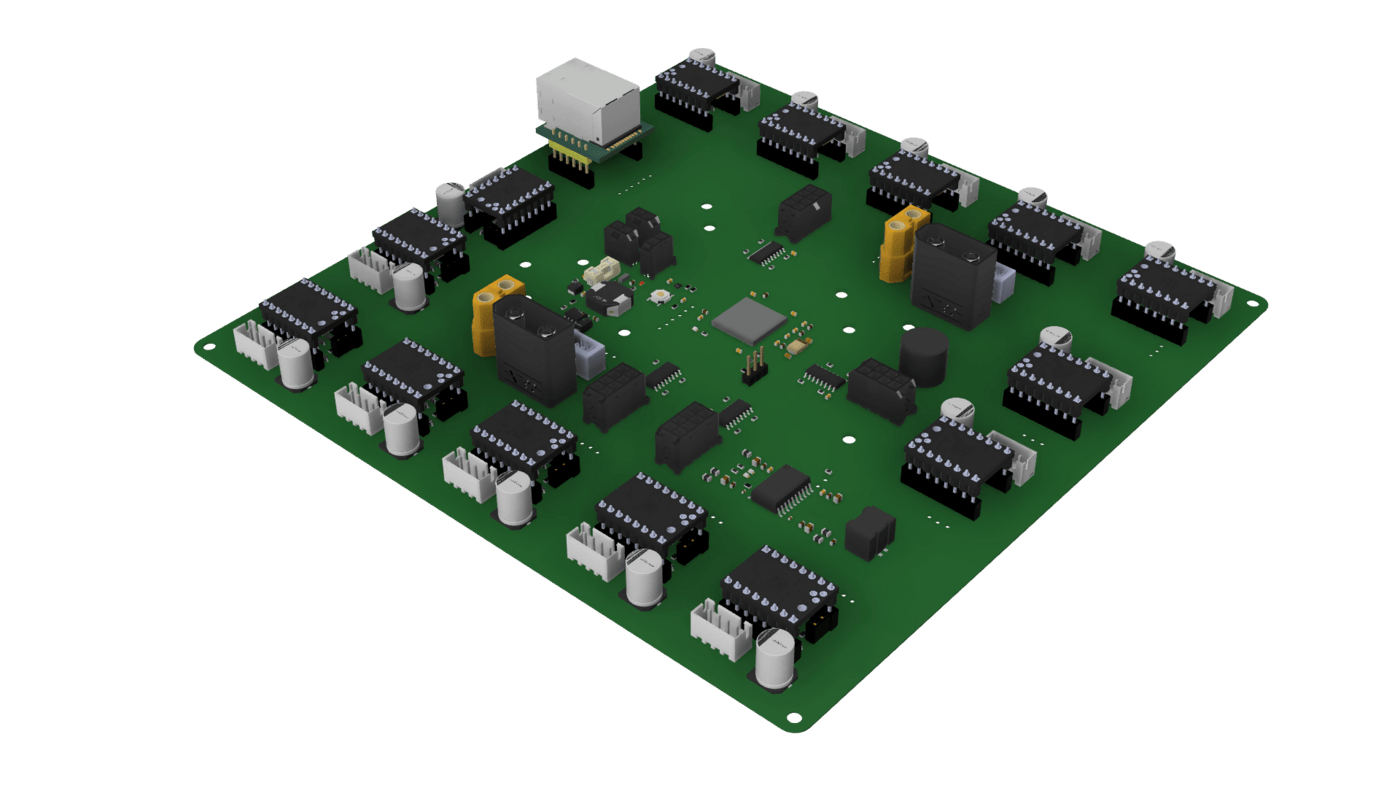
The Main Hull houses a custom PC and the primary electronics stack responsible for power control, sensor and peripheral management, thruster control, remote control, and telemetry. A backplane, facilitates communication between the custom PC and the rest of the electrical system by acting as a CAN-to-USB bridge.
The Power Hull Power Board (POPB) functions as the main power management and distribution unit of the system. This board load balances and allows for hot-swapping of batteries and facilitates the monitoring of battery statistics through RS-485. The Power Hull also incorporates Electronic Speed Controllers (ESCs) and a contactor-based emergency-stop system.
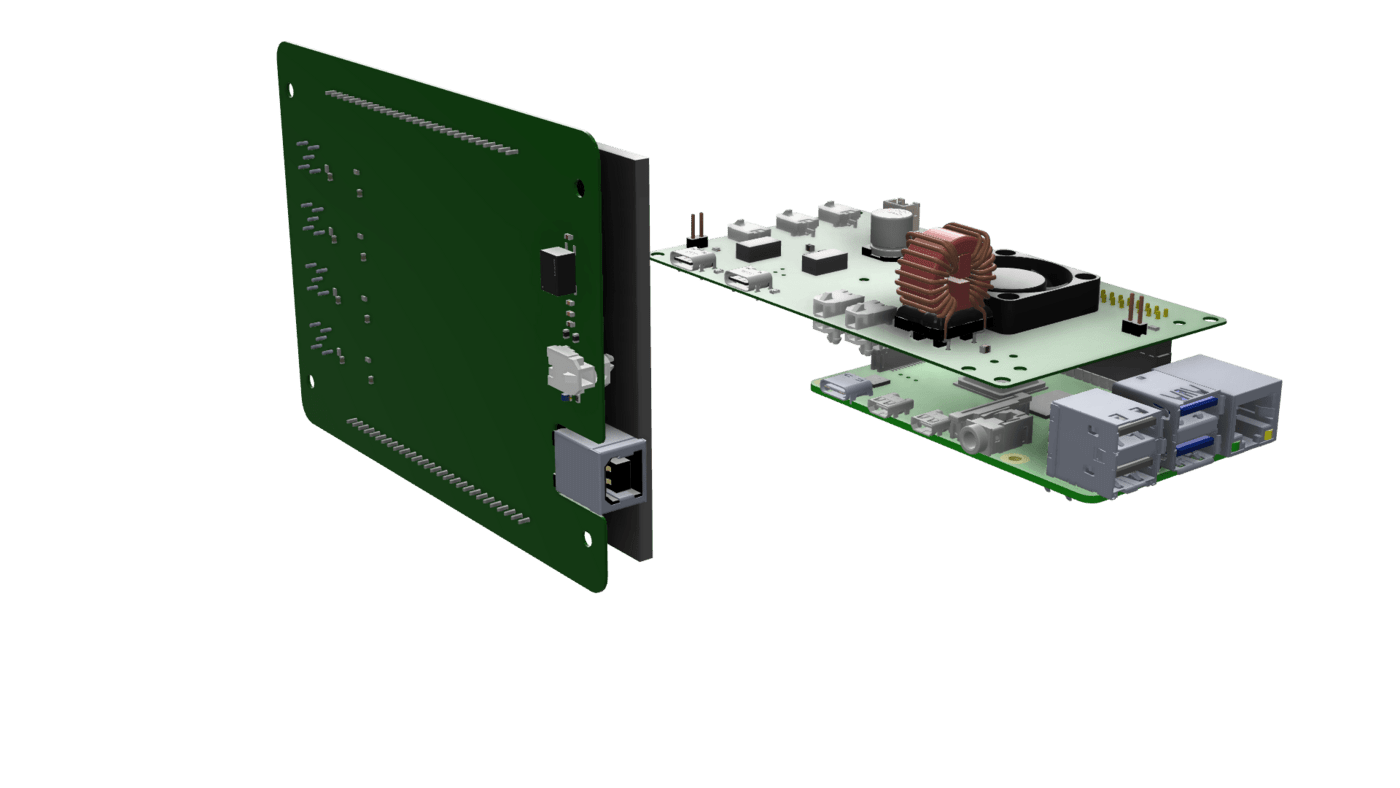
In the Navigation Hull, a Raspberry Pi runs the acoustics and navigation stack, connected to the Sparton AHRS8 IMU and the SBG-Ellipse D Inertial Navigation System, which integrates a dual antenna, multi-band GNSS receiver that enhances our localization pipeline. The acoustics stack features a custom filter and amplification board which pre-processes the hydrophone signals before it is passed through a Data Aquisition Module, enabling us to pick up acoustic pings accurately to complete the Entrance and Exit Gate Task.
The Actuation Hull contains an all-in-one actuation board, powering and controlling the actuation suite which includes the Ballshooter as well as our actuated deployment systems for ease of deployment at our wet-berth site.
Click here for the full design of our various PCBs!
All Powered Up
The BBASV 4.0 integrates numerous electronic components requiring 5 V, 12 V, and 24 V inputs, powered by two Torqeedo Power 24-3500 batteries. Power from the batteries is split into 4 power lines using terminal blocks that go to the 2 ESCs, POPB, and the Actuation Hull respectively. The POPB does load balancing, isolation, filtering and monitoring before it outputs a clean 24V power rail.
The Main Hull Power Board (MHPB) then receives regulated power from the POPB and further regulates and distributes it to other components such as the LiDARs, water pump and the custom PC. The Main Hull Power Board also facilitates power control through selective toggling of power channels, which enables power sequencing to limit inrush current. This feature is further integrated with other systems to be accessed over serial monitor, remote control and via the custom PC, improving our system robustness.
Land to Sky Communication
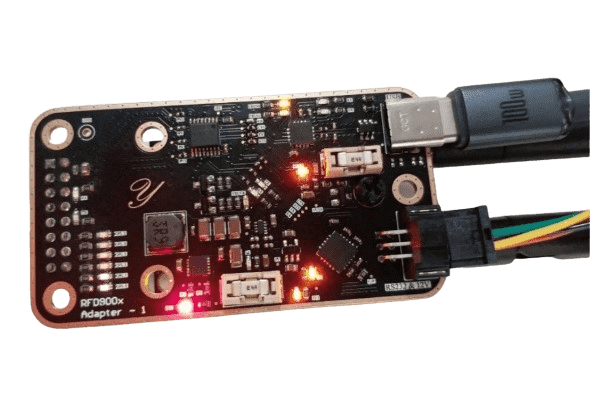
To facilitate inter-vehicle communication (IVC), we use an all-in-one adaptor for our radio board for ease of integration with the different systems. This board is capable of drawing from various power sources and transmitting data over multiple protocols.
We implemented a lightweight driver and transport protocol between this wireless link and our software stack. This low-latency driver implements reliability features of the protocol such as error checking and auto-retransmission.
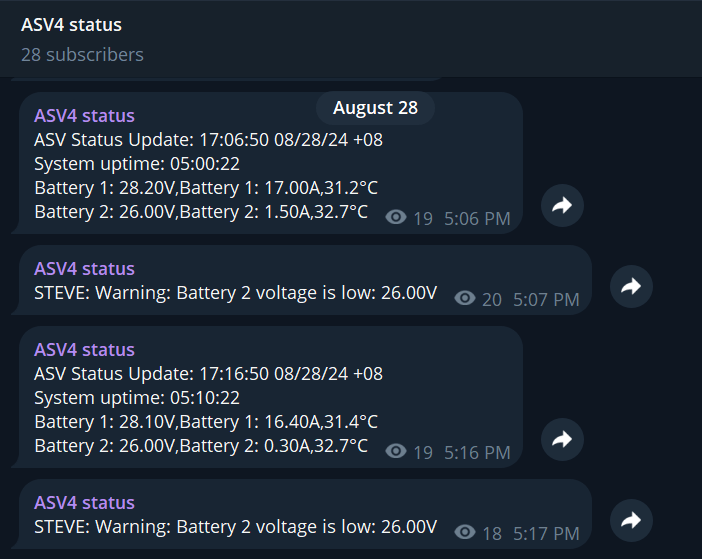
Telemetry with Telegram
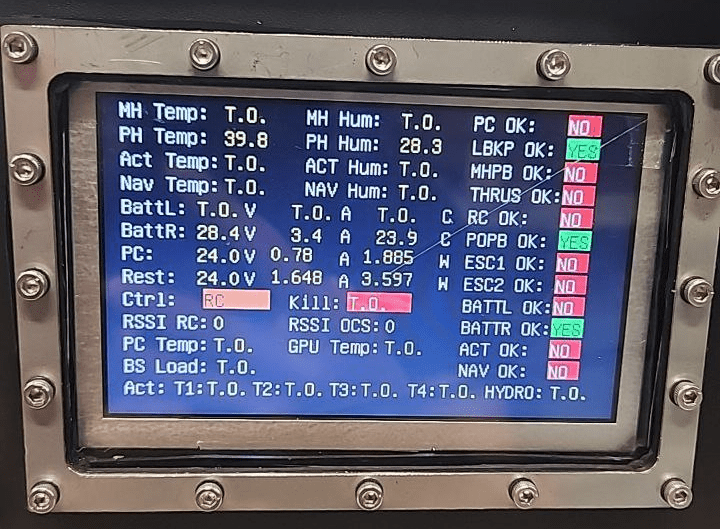
One QOL aspect we focused heavily on this year was to develop new sources of monitoring vehicle telemetry data in addition to the existing Main Hull screen. Following the successful implementation of displaying telemetry on our Operator Control Station’s in-built screen for RoboSub 2023, we have expanded our telemetry sources and added new displays.
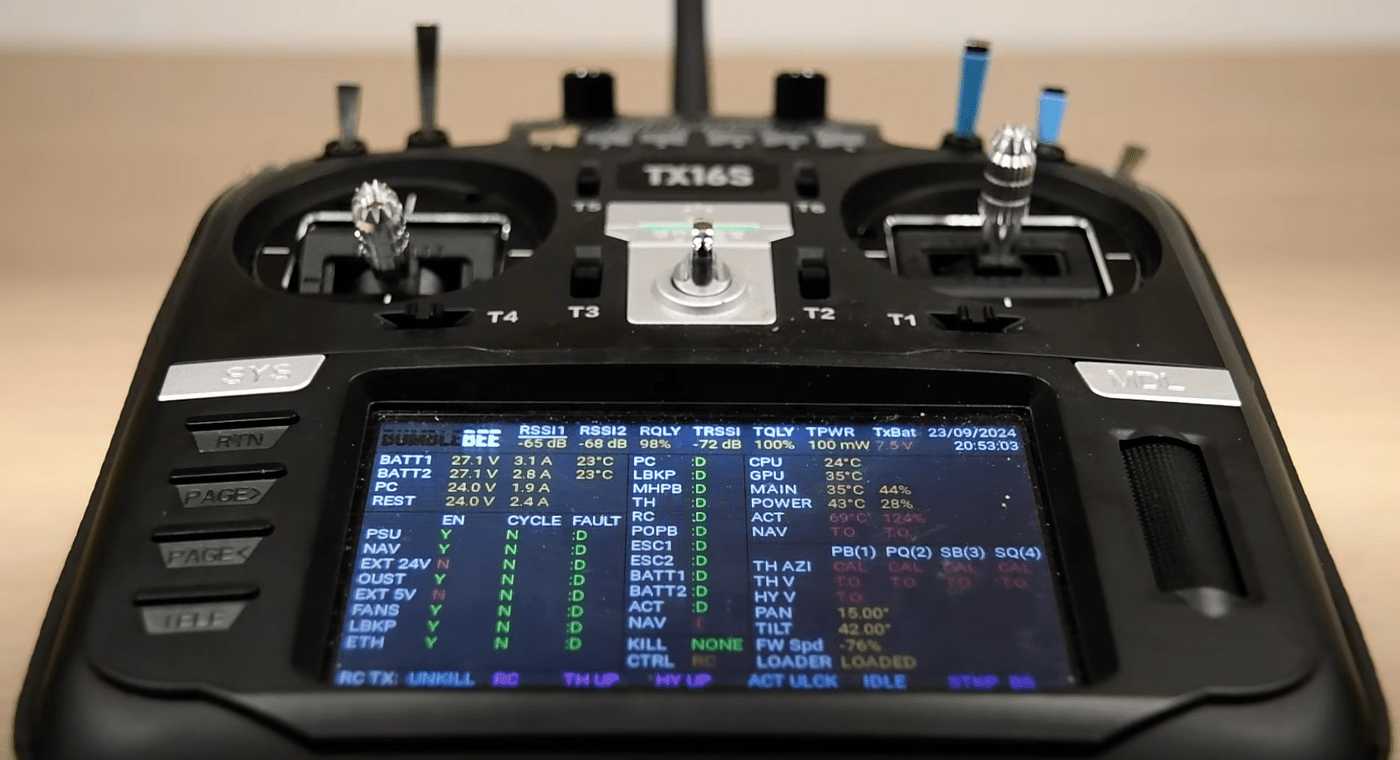
Modified firmware on our remote controller allows for the display of telemetry data, and incorporates voice alerts and haptic feedback for enhanced situational awareness. This ensures the operator is well-informed of changes in key indicators and can quickly take manual control or kill the vehicle even when the vehicle is far out at sea.
Additionally, our software subteam has implemented a Telegram Messenger bot which periodically broadcasts battery statuses and other relevant metrics. This allows us to better coordinate the movement and charging of other batteries.