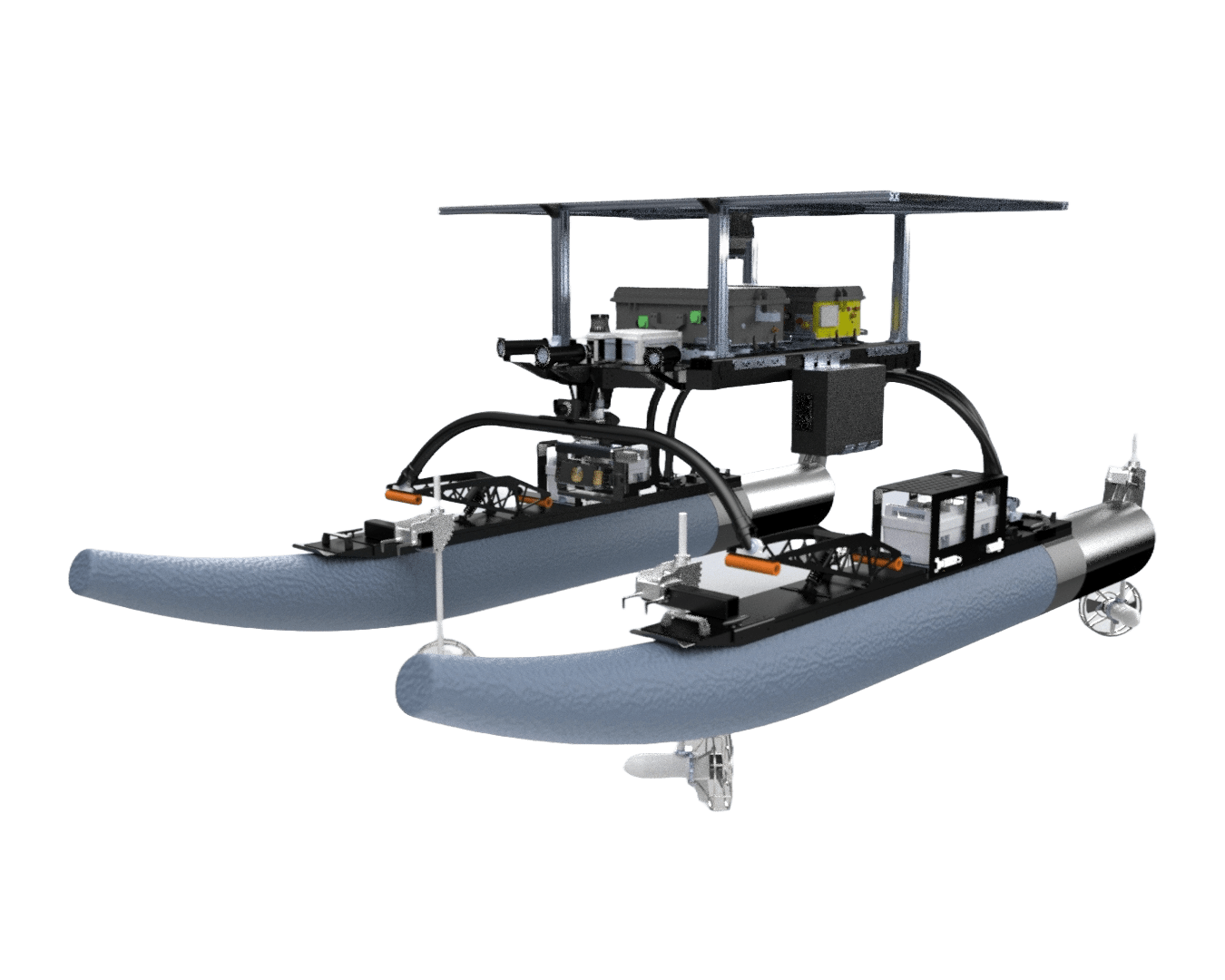
Bumblebee ASV 4.0
- Degrees of Freedom
- 3 (Surge, Sway, Yaw)
- Power System
- Torqeedo Power 24-3500 (x2)
- Perception Sensors
- FLIR Blackfly S GigE Camera (x3)
- Ouster OS-0-128 LiDAR
- Ouster OS-1-64 LiDAR
- Manipulators
- Actuated Hydrophones & Thrusters for stowing/deployment
- Ballshooter with pan-and-tilt system
- Wireless Communications
- Radio Link – 900MHz RFD900x modem
- Data Link – 5.8GHz Ubiquiti Rocket 5 AC Prism
- RC Link – 2.4GHz BETAFPV SuperD ELRS, Radiomaster TX16S Mark II Controller
- Others
- RGY Light Tower (x2)
- Onboard Computer
- Intel i7-12700, 32GB DDR5 RAM
- NVIDIA RTX 4000 SFF
- ASUS TUF GAMING B760M GAMING PLUS WIFI
- Propulsion System
- Minn Kota RT80 Saltwater Transom-Mount Motor (x4)
- Acoustics
- Teledyne Reson TC4013 (x4) Hydrophone Array
- Custom Acoustics Filter Board
- Digilent MCC USB-1808X Data Acquisition module
- Multiple Signal Classification algorithm for DOA calculation
- Navigation System
- SBG Ellipse-D (Miniature INS/GPS)
- Sparton AHRS8 (Inertial Measurement Unit)
- Raspberry Pi 4B+ (Single Board Computer)
- Software Architecture
- Robot Operating System 2 (ROS 2)
- Ubuntu Linux 22.04 LTS
- Payload
- Jellyfish 2.0 – Bumblebee’s Unmanned Aerial Vehicle
- Static Drone Take off and Landing System