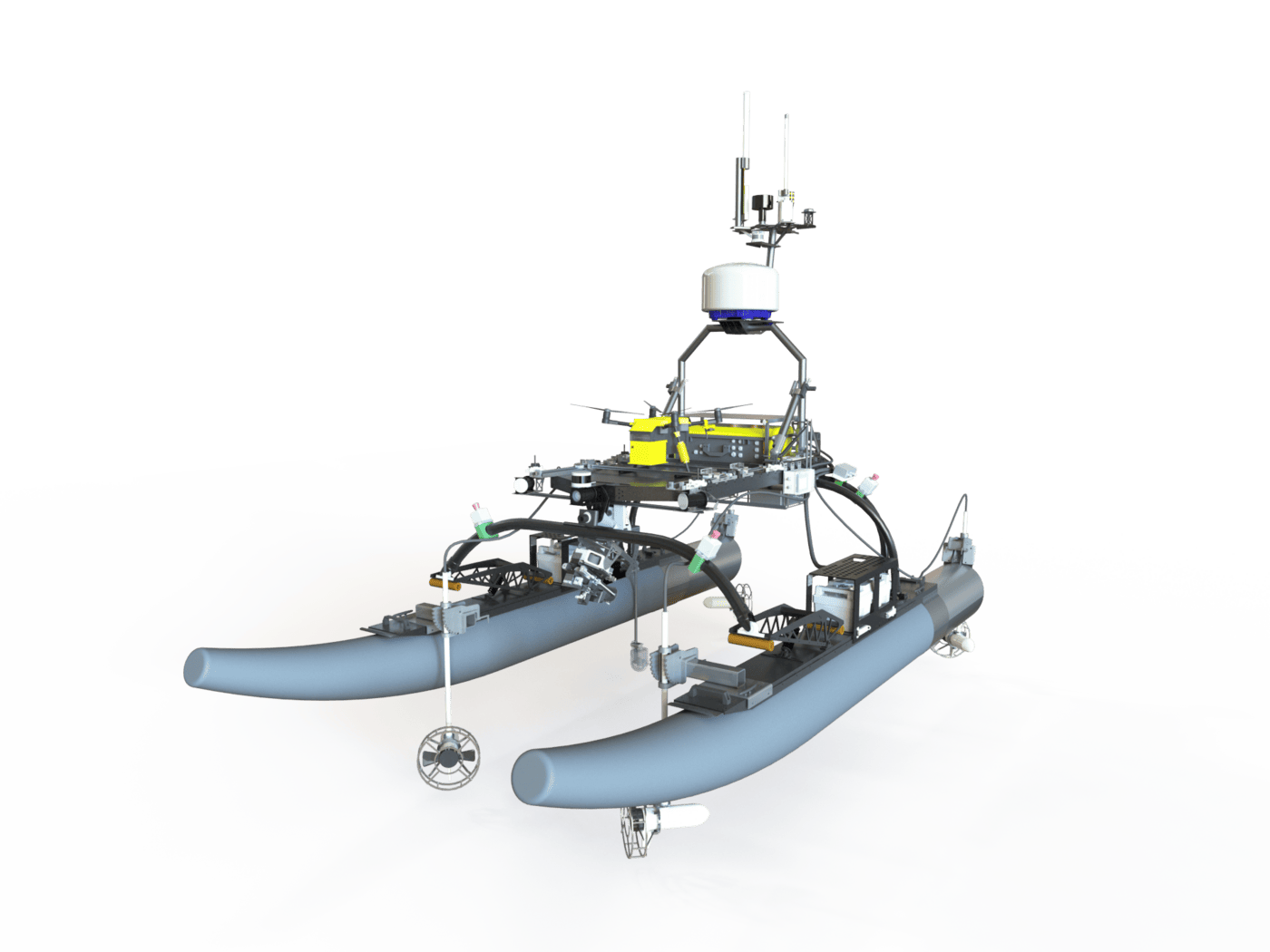
BBASV 3.0’s overall mechanical design centred around the inclusion of a drone take-off and landing system on the payload tray, due to the requirement of a UAV in RobotX 2022. Various mechanical upgrades also sought to address shortcomings identified during RobotX 2018, such as cracks in the mast due to vibrations or the main hull shelter trapping wind and causing significant upward drag.
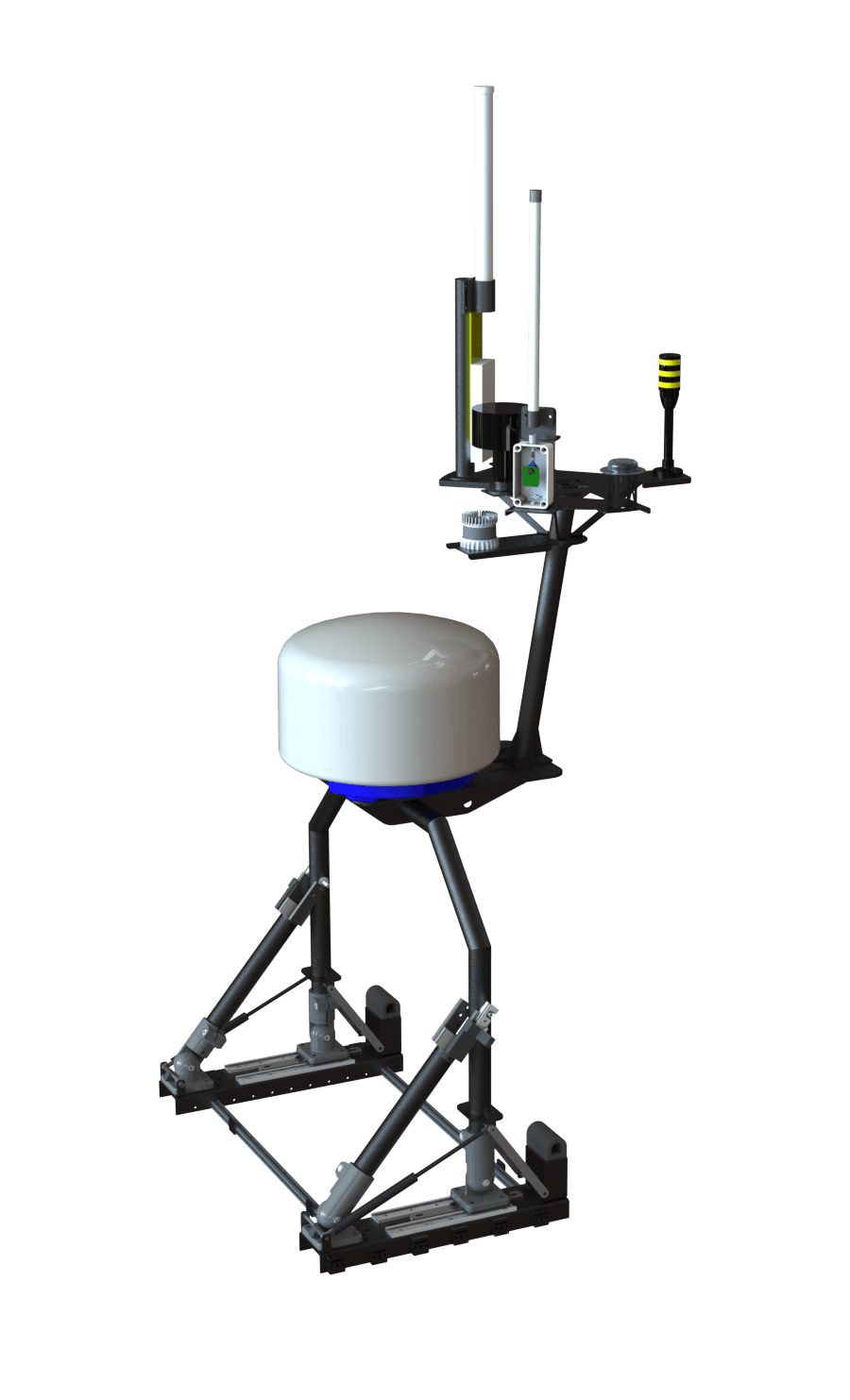
Sensors & Antenna Mast
The sensors and antenna mast houses most of the sensors and stands 2.5 m above sea level, providing a good balance between antenna range, mast weight, and ease of assembly. It is split into 3 separate interlocking parts to allow quick disassembly for transportation, reducing the risk of damage to the mast before deployment, and is also able to be completely lowered to allow for easier maintenance and storage of the ASV.
For the new design, an arch support was chosen over the single beam support featured on the previous mast, in order to reduce the stress sustained by the support system. Instead of a welded base, we opted for aluminium swivel clamps to allow the mast to be easily raised and lowered, without compromising on strength. After raising the mast, 2 support arms lock it in place to ensure stability. While lowering the mast, a linear guide rail is used to shift its pivot point towards the centre of the ASV. This aligns the centre of mass of the mast and ASV as much as possible, preventing a large weight imbalance. Lastly, a gas spring is installed on both sides of the arch support to assist in raising the mast.
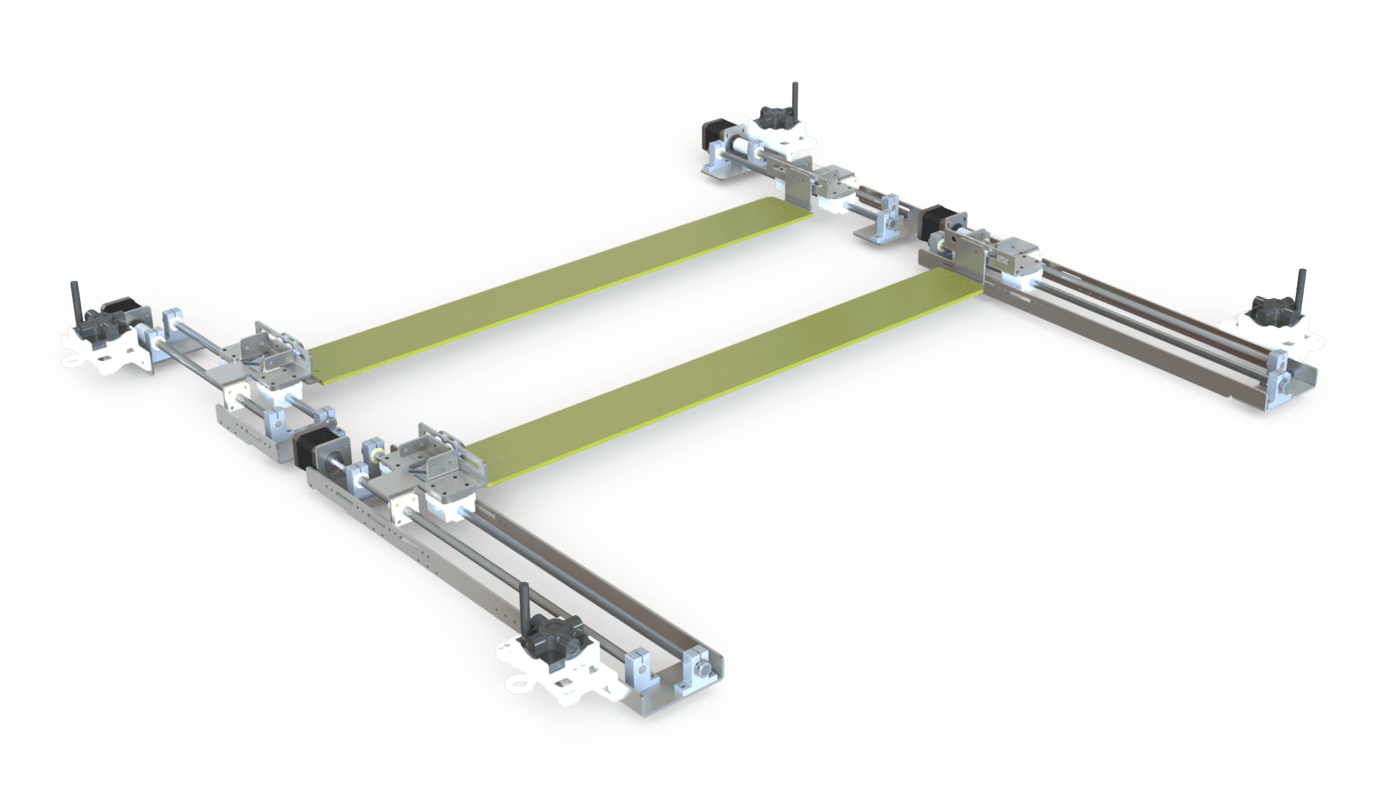
Drone Take-off & Landing System
The Drone Take-off and Landing System (DTLS) ensures the safe deployment of the UAV. It consists of 4 linear stages driven by stepper motors to clamp the BBUAV 1.0 when it lands on the BBASV 3.0, securing it safely to the ASV when it is not in use.
These linear stages are independently driven by 4 stepper motors. Using StallGuard™ technology allows the actuators to achieve sensorless homing. Additionally, the linear stages stop clamping upon encountering resistance over a fixed threshold, allowing a successful drone clamping to be detected without additional sensors.
The clamps of the DTLS are designed to secure and reorient the UAV after landing. Additionally, these pushers are spring-loaded to accommodate misalignment of the linear stages. Oil-impregnated polymer bearings were used to reduce part count and cost, as well as increase maintainability while ensuring smooth motion.
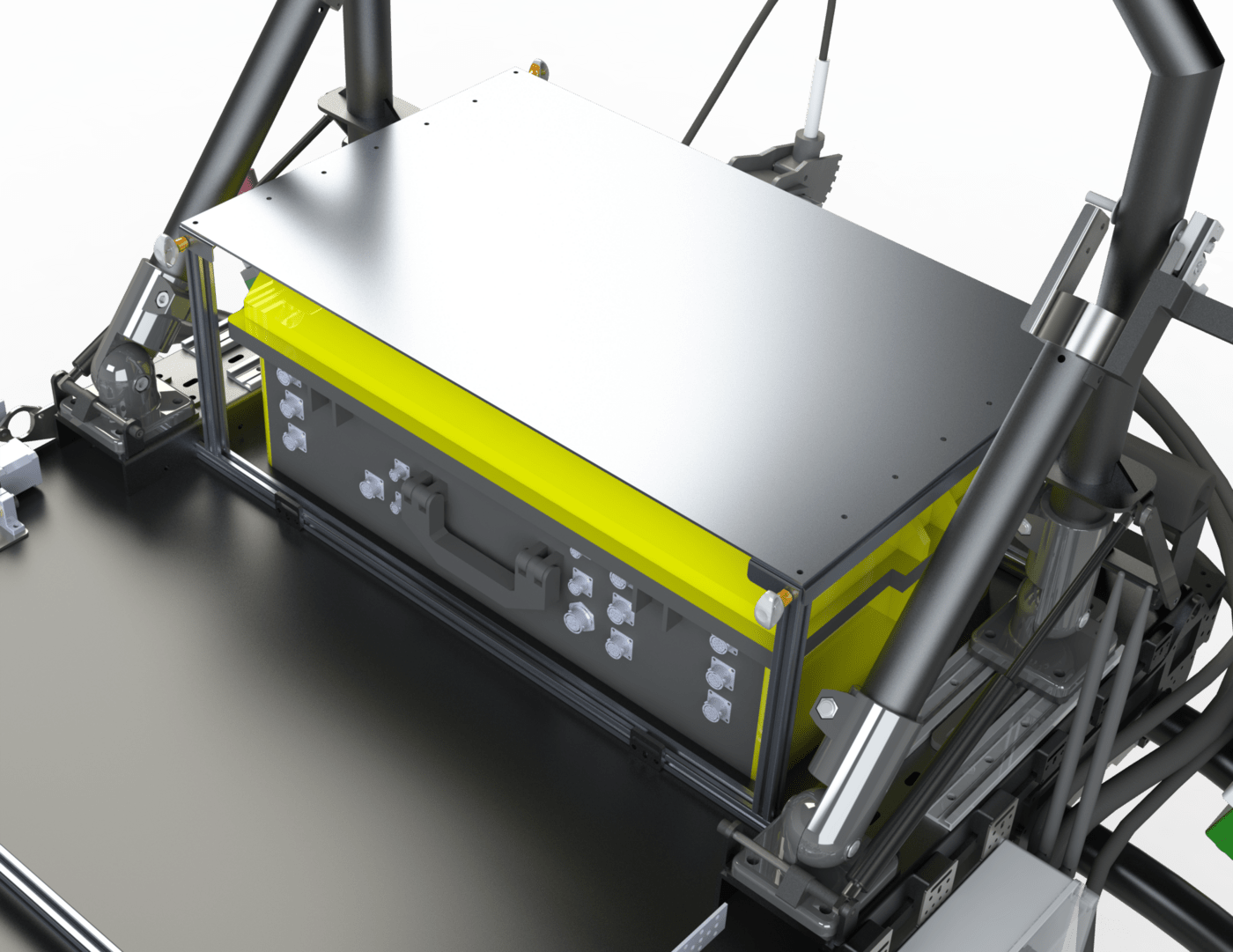
Main Hull Shelter
The main hull shelter prevents the main hull from being directly exposed to sunlight, reducing heating due to black-body absorption. Additionally, it serves to provide extra protection against heavy rainfall. The shelter was redesigned to accommodate the new drone take-off and landing system, which takes up much of the payload tray and reduces the available space for the shelter.
Furthermore, we also found that the canvas used in the previous iteration would often trap wind and cause significant upward drag on the ASV. Thus, the new design fits the main hull exactly, and is constructed out of aluminium profile bars and composite sheets. It is secured by locking pins, allowing the top sheet to be quickly removed for easy access to the main hull during maintenance.