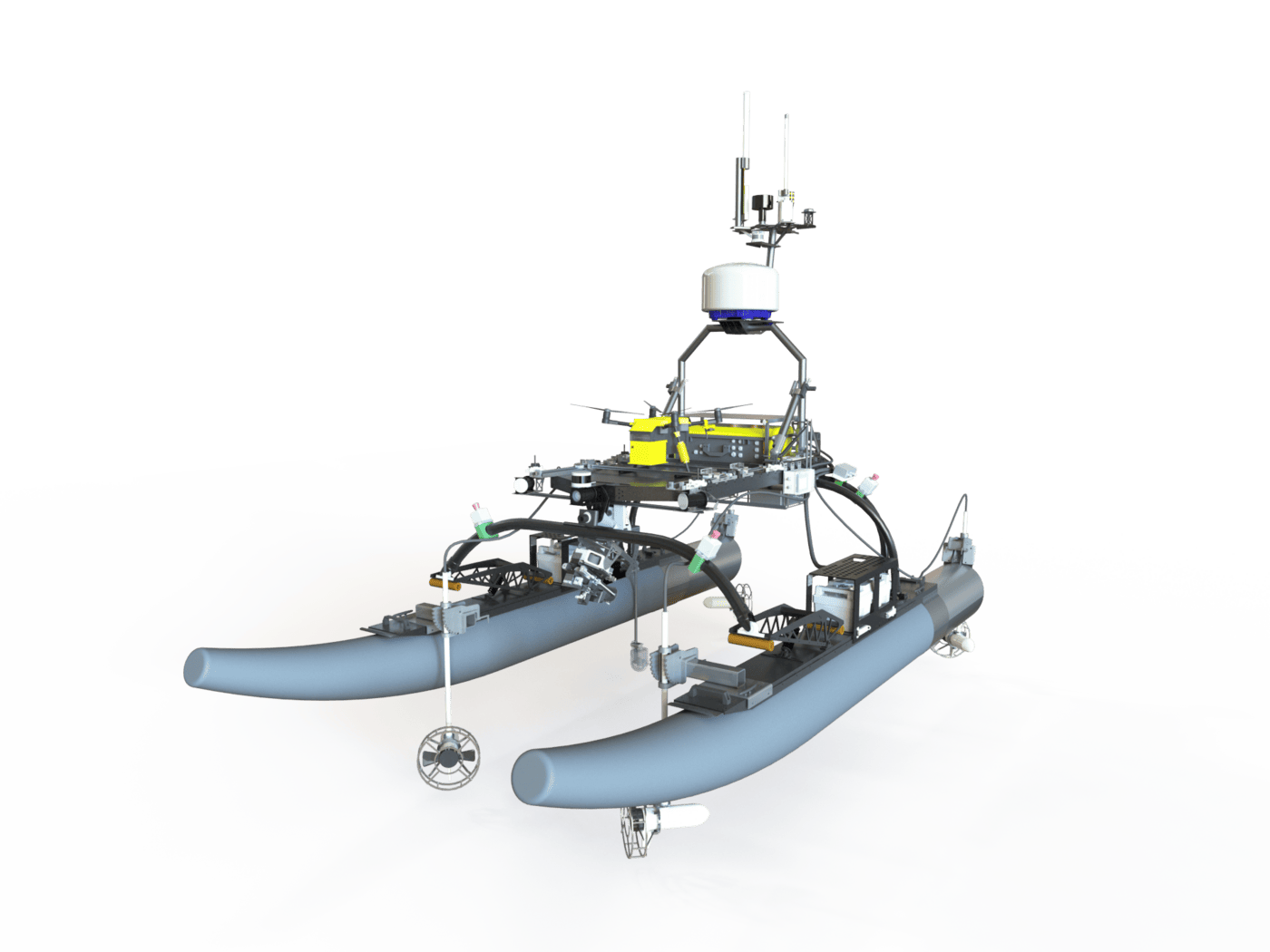
Bumblebee ASV 3.0
- Dimensions
- 4 m x 2.45 m x 3.3 m
- Degrees of Freedom
- 3 (Surge, Sway, Yaw)
- Power System
- Torqeedo Power 26-104 (x2)
- Perception Sensors
- Blackfly S Camera for 180° panoramic vision (x3)
- Velodyne VLP-16 LIDAR for immediate collision avoidance
- Ouster OS-1-64 LIDAR for crowded environment mapping
- Wartsila RS24 Gen 4 Radar for long range collision avoidance and sea navigation
- Manipulators
- Drone Take off and Landing System
- Ball Shooter
- Wireless Communications
- Control link – 2.4GHz N2420
- Data link – 5.8GHz Ubiquity Rocket 5 AC Prism
- RC Link – FrSky Taranis X9D+, FrSky X8R-II Receiver
- Endurance
- Full Throttle – 17km range, 1.6 hours runtime
- Slow Throttle – 30km range, 8 hours runtime
- Onboard Computer
- Intel i7-12700, 32GB DDR5 RAM
- NVIDIA RTX A2000
- Propulsion System
- Minn Kota RT80 Saltwater Transom-Mount Motor (x4)
- Acoustics
- Hydrophone array based on Teledyne Reson TC4013 hydrophones
- NI9223 Analog input module
- NI sbRIO-9606 400MHz controller with Xilinx Spartan-6 LX45 FPGA
- High resolution Multiple Signal Classification algorithm for DOA calculation
- Navigation System
- SBG Ellipse-D (Miniature INS/GPS)
- Sparton AHRS8 (Inertial Measurement Unit)
- Odroid XU4 (Single Board Computer)
- Raspberry Pi 3B+ (Single Board Computer)
- Software Architecture
- Robot Operating System (ROS)
- Ubuntu Linux 18.04 LTS
- Payload
- Bumblebee Unmanned Aerial Vehicle 1.0
- Drone Take off and Landing System