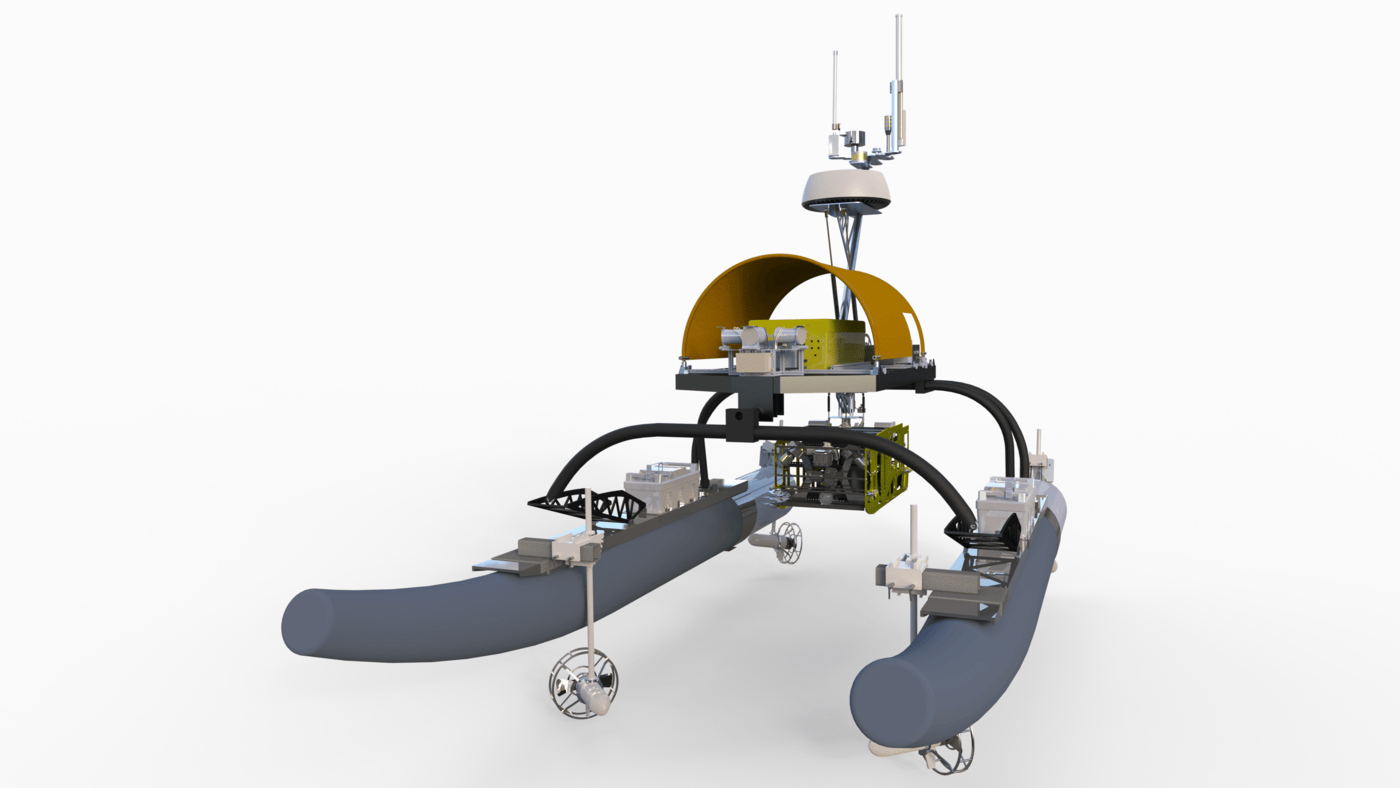
BBASV 2.0’s overall mechanical design was reworked to support the Launch and Recovery of BBASV 3.5. Mechanical support structures were designed to support the additional sensor payloads, thrusters, battery and actuator systems. The system was designed to Sea State 3 conditions to withstand the wind and rain during bad weather conditions.
Antenna Mast
The Antenna Mast houses several sensors and antennas high up on the ASV for better reception. The Antenna Mast was made to be easily foldable, using lockable mechanical gas springs for easy transportation during deployment of the ASV.

Manipulators
The ball shooter is electrically actuated and housed in waterproof enclosures. The projectiles are propelled by counter rotating wheels driven by brushless DC motors while a scotch yoke mechanism is used to convert the rotary motion from servo motion to a linear motion and reload the balls.
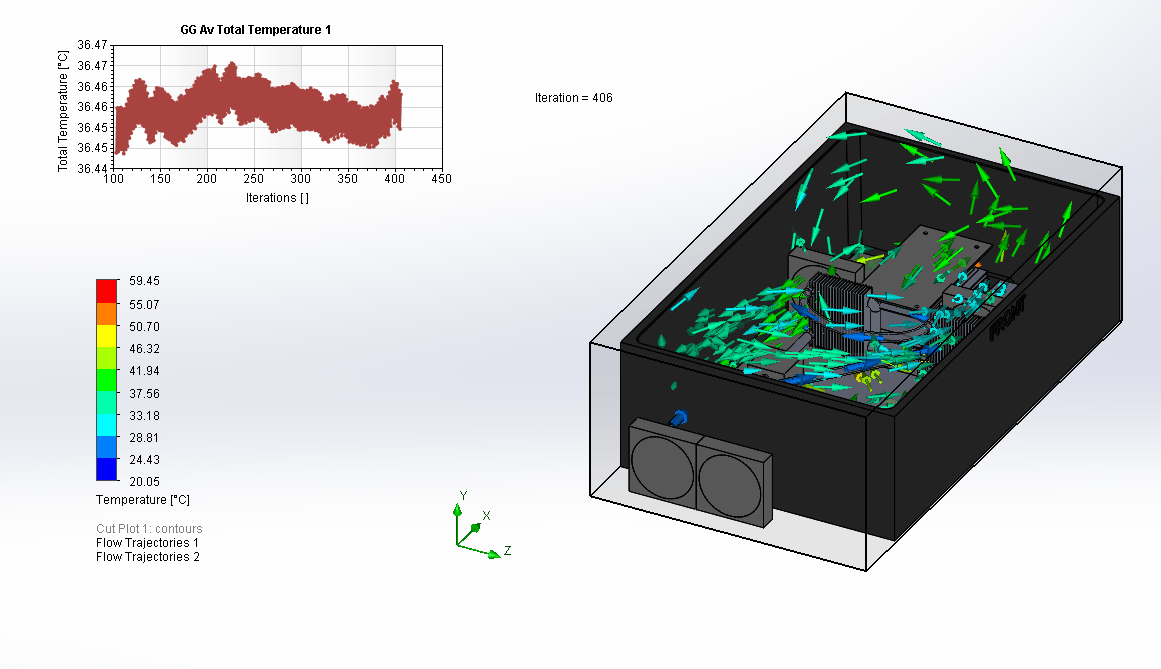
Cooling System
A custom cooling system was developed to make sure the ASV’s main computer does not over heat. Liquid cooling was used to increase the efficiency of cooling. The convection currents were simulated to maximise heat dissipation within the main housing.
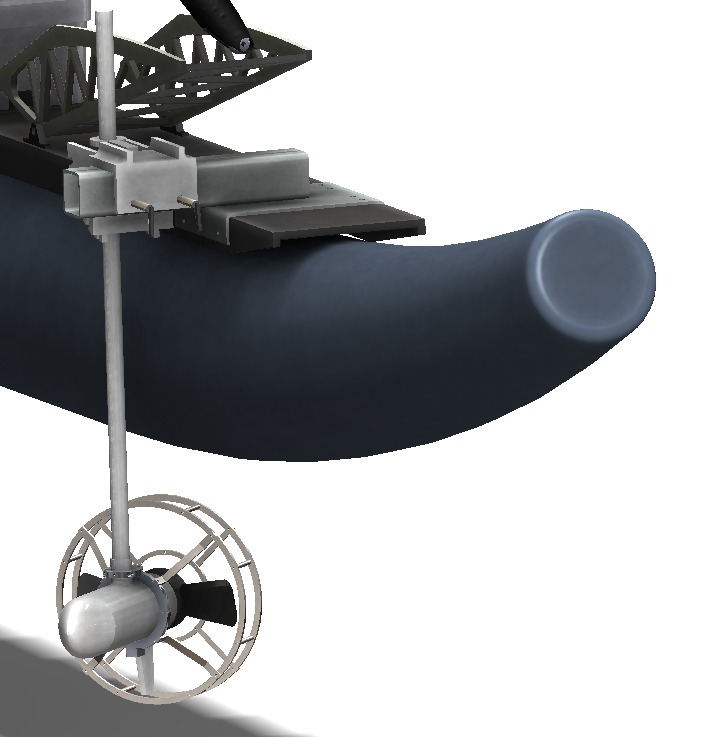
Thruster Mounting and Guard
Thrusters are mounted in a holonomic formation. This gives use the ability to move sideways as well as forwards. A shroud was built around the thruster in order to prevent the blades from getting damaged. Additionally a special mount was designed to minimize vibrations.
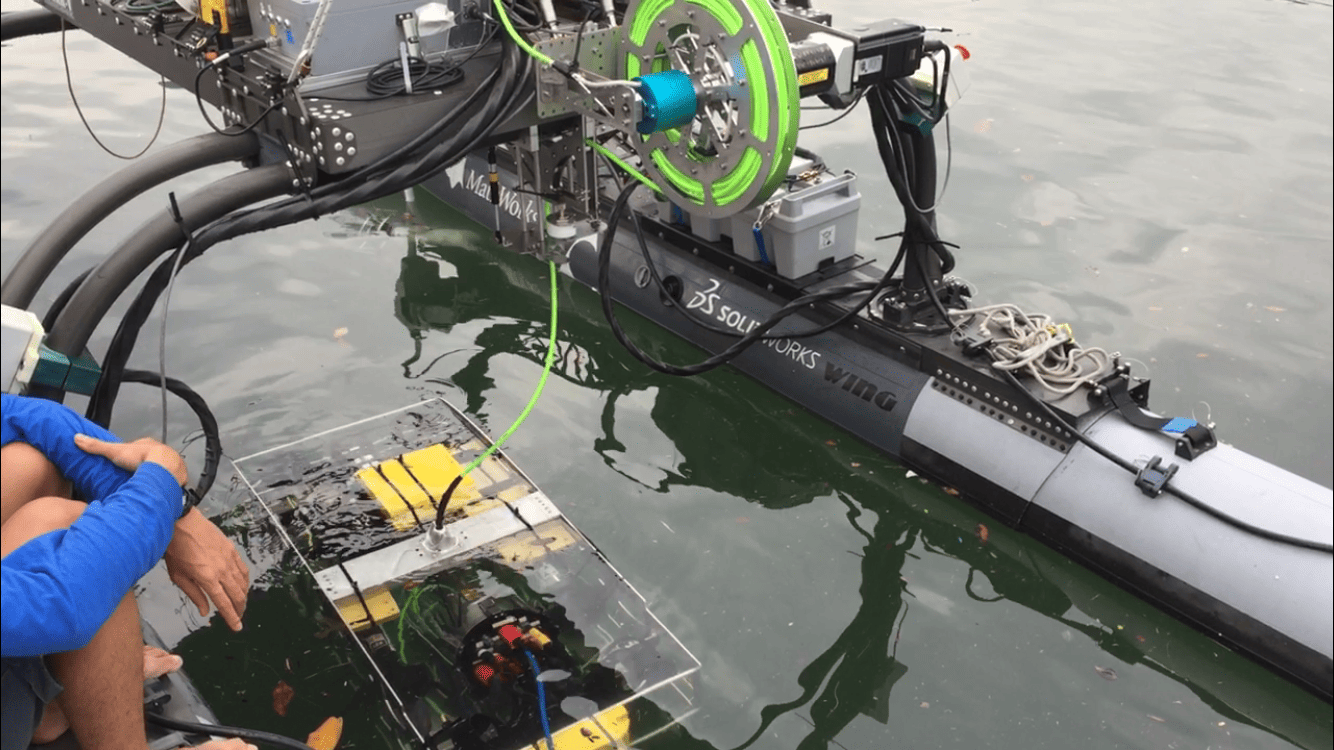
Launch and Recovery System
A Launch and Recovery System was developed to make multi-vehicle operations between the BBAUV 3.5 and ASV 2.0 possible. A winch is used to support the weight of the AUV. The AUV can be brought out by the ASV to a desired location and then be deployed to perform tasks. A new frame was also developed for the AUV for safe launch and recovery.