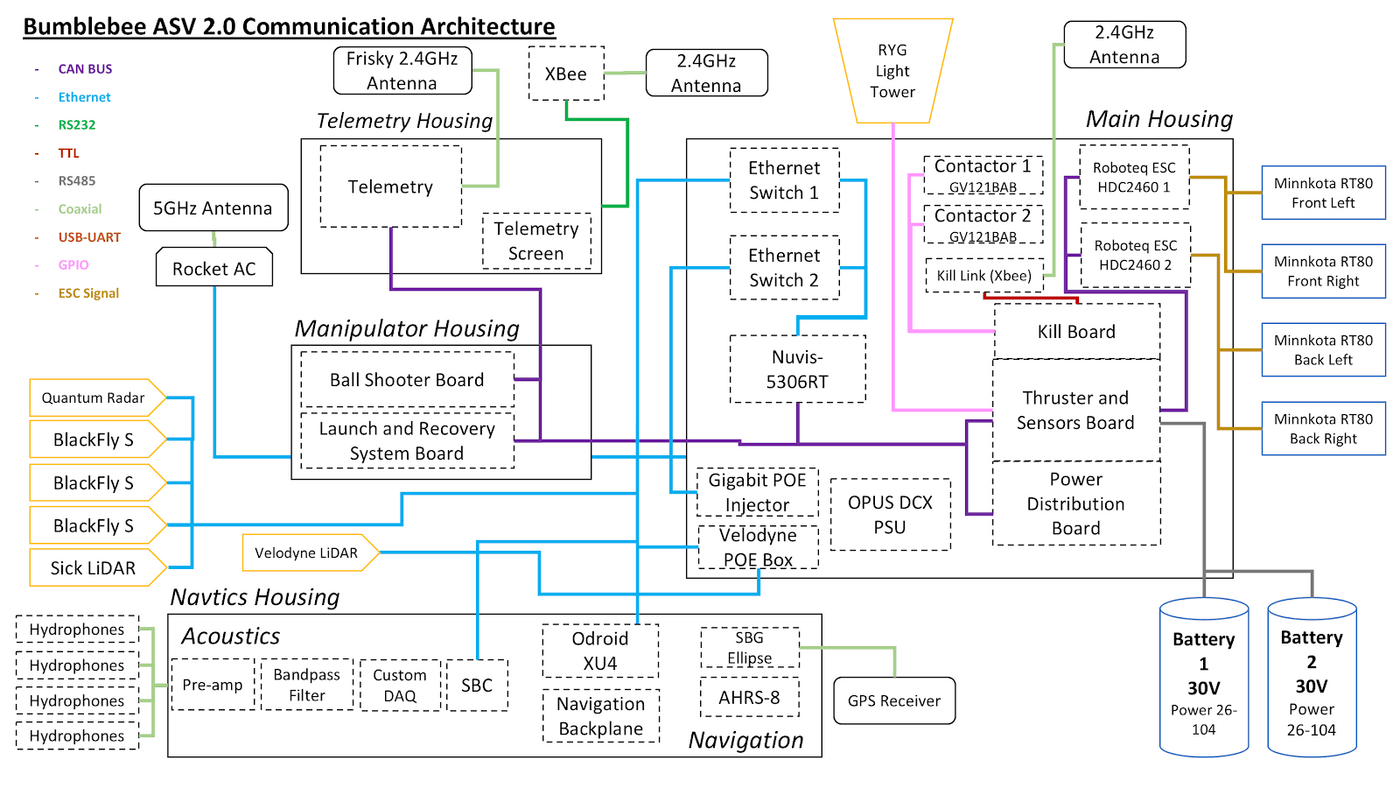
The overall electrical system of the ASV is split into multiple housings, namely the Navigation and Acoustics housing, Telemetry housing, Manipulator housing and the Main housing. The Main housing contains the electronics which are the backbone of the whole electrical system and are categorised into 3 sub-systems: Power Distribution, Sensors and Actuation, and Kill system.
Ethernet and CAN remain our primary methods of communication for high and low level components respectively.
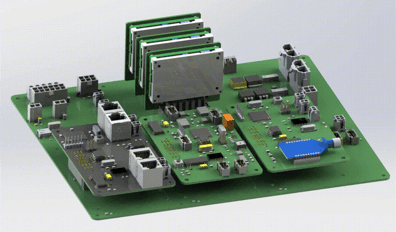
Standardized Backplane
The key design consideration was for flexibility and eliminating mis-plugging of PCBs onto the backplane. Each of the isolated DC-DC converters could be plugged onto the backplane and the same custom PCB was utilised for all three converters, which output different voltages, by allowing multiple configurations during component assembly. The three daughter boards also utilise the same concept of using a standardised pin mapping to connect to the backplane.
A Quad-FTDI circuit was integrated onto the ASV backplane, providing the interface to reprogram the firmware of multiple daughter boards with a single USB cable on-the fly.
Electrical Drive System
The BBASV 2.0 utilises four Minn Kota Riptide RT80 thrusters in a holonomic configuration, allowing the craft to perform omnidirectional movement while maintaining a fixed heading. A pair of Roboteq HDC2460 Electronic Speed Controllers (ESC) are used to control the Minn Kota Riptide RT80. The Thruster Daughter Board interfaces the Roboteq HDC2460 ESC via CAN using the CANOpen protocol, apart from monitoring internal humidity and temperature, battery information and controlling the light tower which indicates the ASV operation mode.
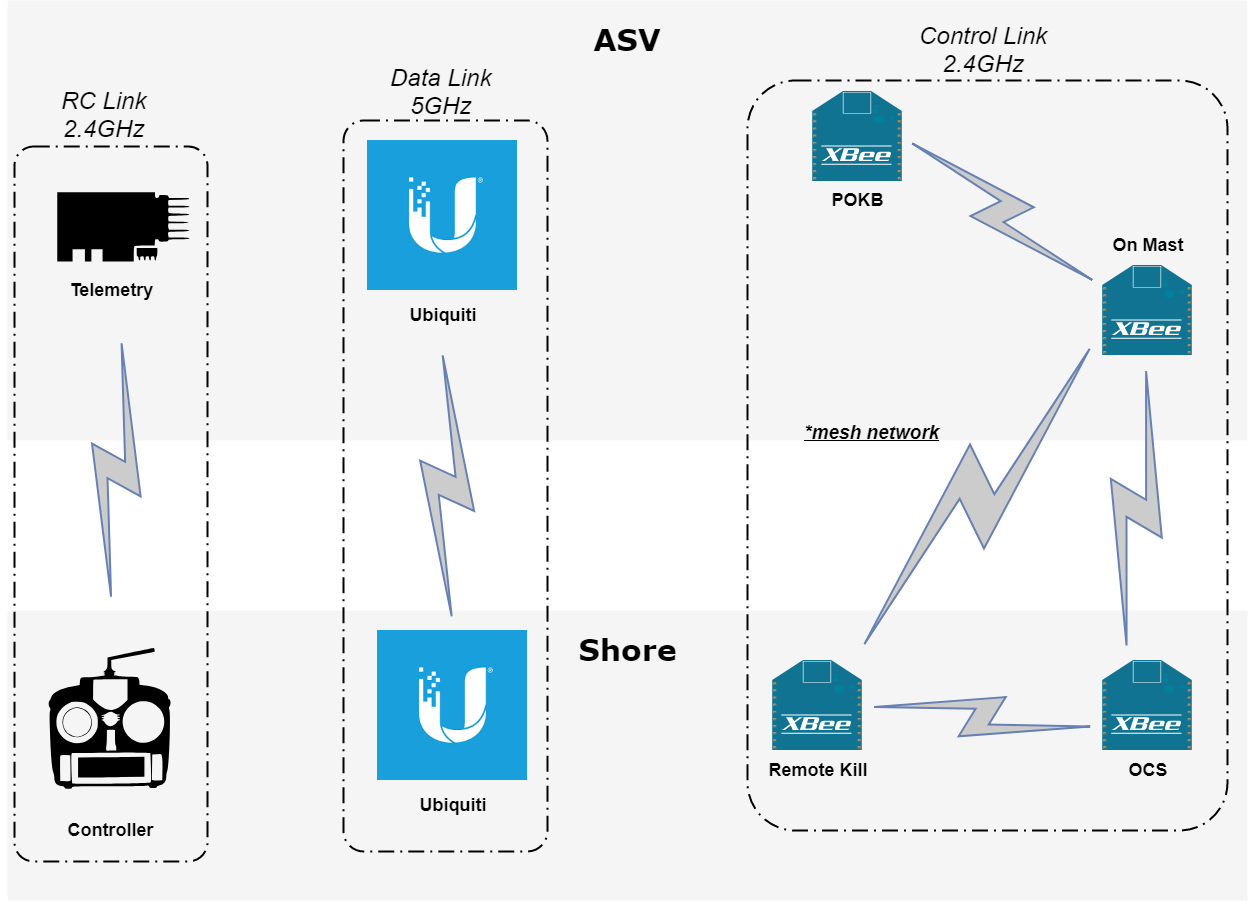
Wireless Offshore Communication
The Operator Control System (OCS) houses the on-shore communication links to the ASV. The communication links are split into two separate wireless links. The data link, backed by a pair of Ubiquiti Rocket Prism AC, is a high speed 5Ghz link used mainly for streaming of sensor data, such as like camera feed and LiDAR point clouds. The control link is a robust long-range 2.4GHz link used to send hardware statuses and provide safety features such as manual teleoperation and emergency stop of the ASV. An additional Remote Control (RC) link is implemented to allow manual control of the ASV at hardware level.