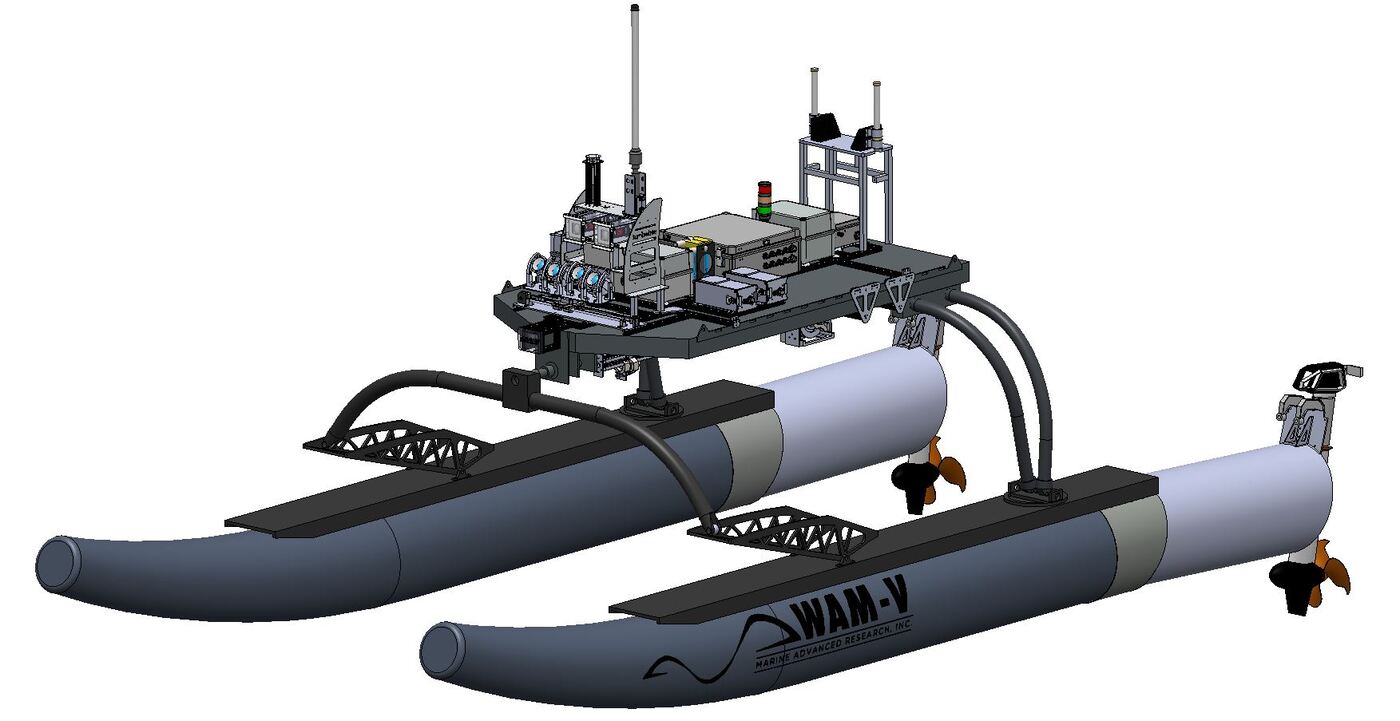
The mechanical design of BBASV takes into account the positioning, arrangement and integration of all the onboard components. Design, assembly and Finite Element Analysis are done in SOLIDWORKS. The objective of BBASV is to achieve modularity, flexibility and reliability of the vehicle.
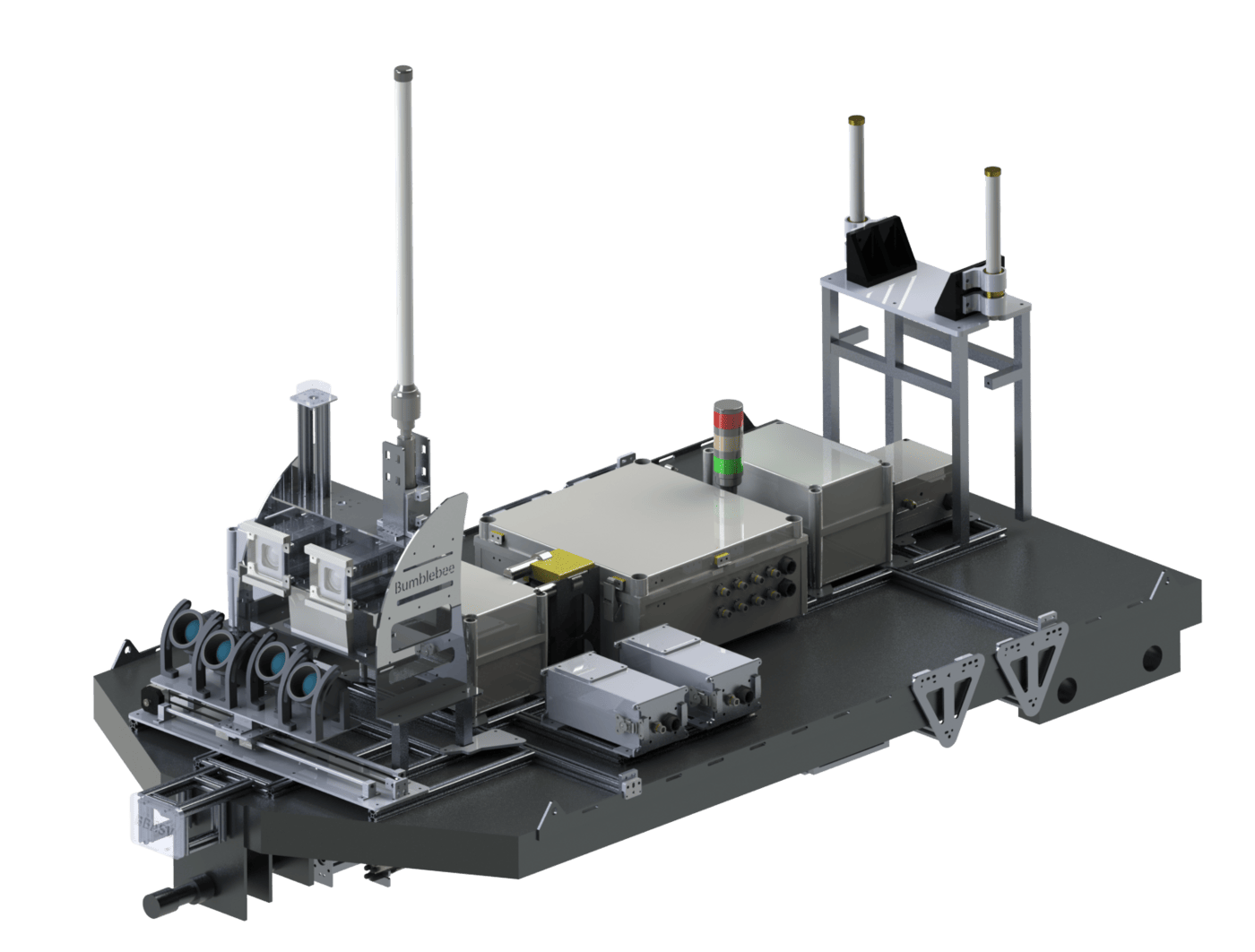
Modularity
The payload tray has been framed up with profile bars to enable quick re-positioning of components. The frame ensures that the placement of critical sensors is fixed, so that minimal calibration due to shift in placement is required.
Modularity is also achieved by housing different systems in separate enclosures.

Cooling System
Testing for long hours in the tropical weather in Singapore is likely to introduce over-heating of the main computer, an issue we faced with our AUV. Thus we have decided to integrate a closed loop water cooling system into our main system enclosure. The liquid cooling system allows a means for heat generated within to be transferred to the surrounding environment, hence mitigating the issue of high temperatures within the main hull.
Manipulators
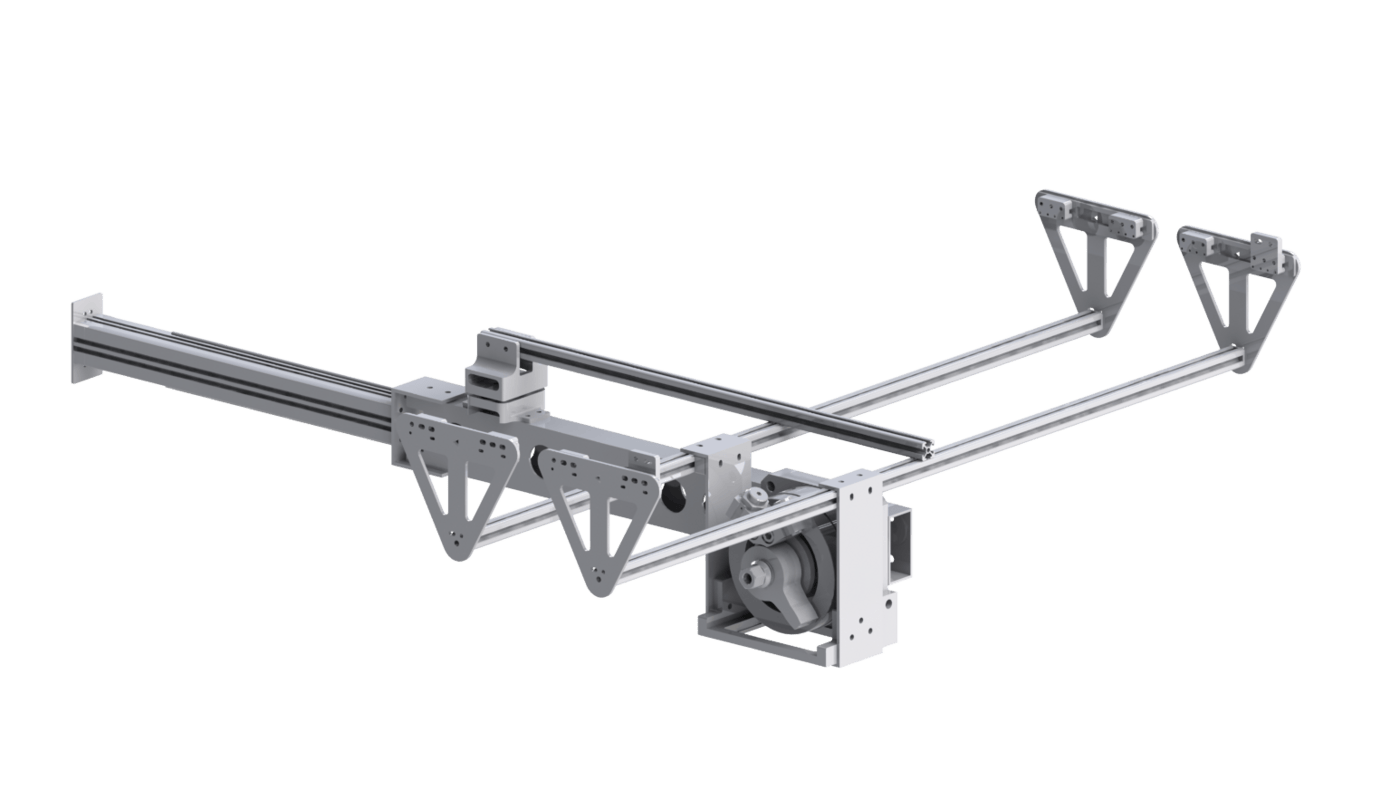
BBASV features two sets of pneumatics manipulators. One of it is the Hydrophones Actuator, which is combination of a rotary and linear actuator to extend the hydrophones array deep into the water to achieve better acoustics localization.